Classement




Contenu populaire
Affichage du contenu avec la meilleure réputation le 10/19/21 dans toutes les zones
-
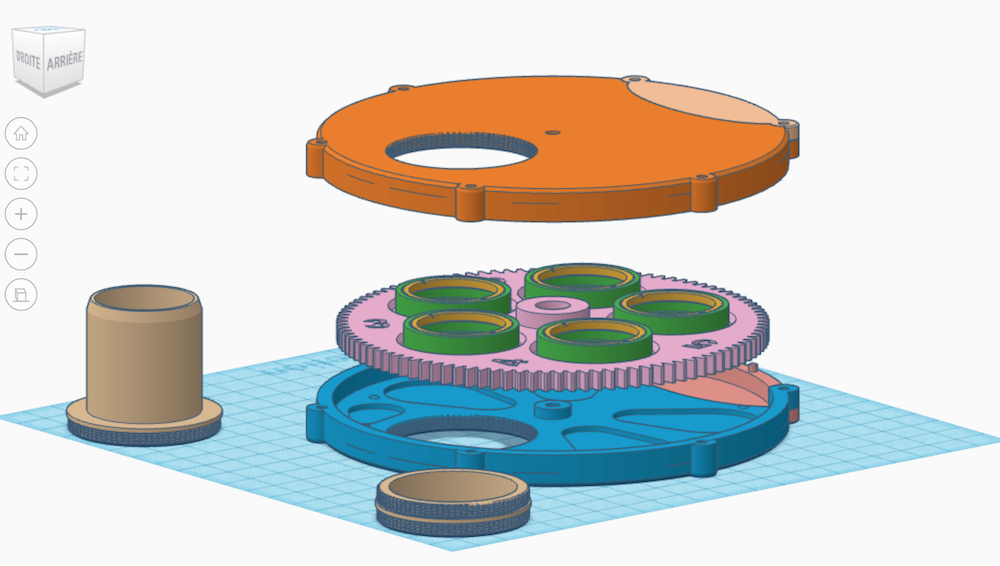
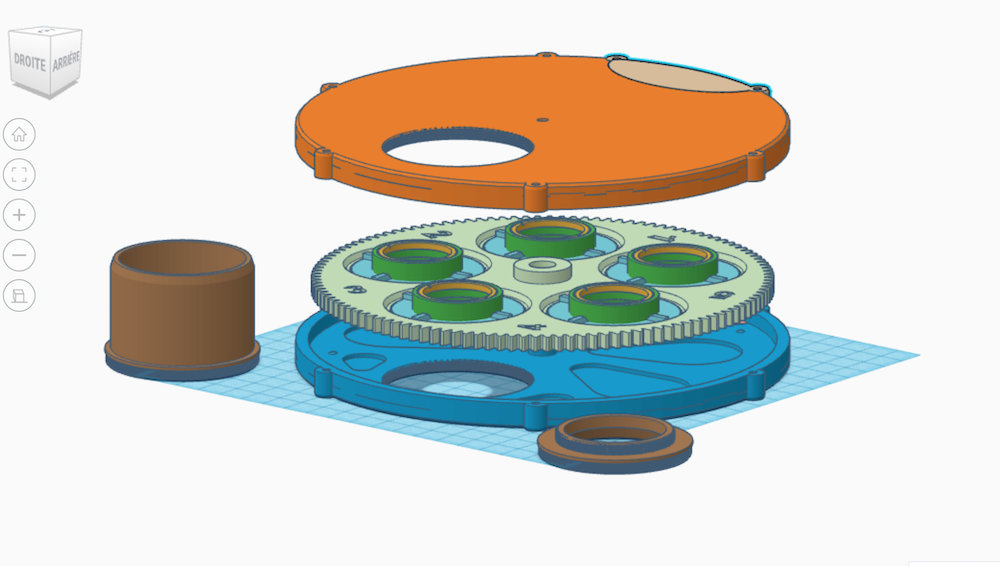
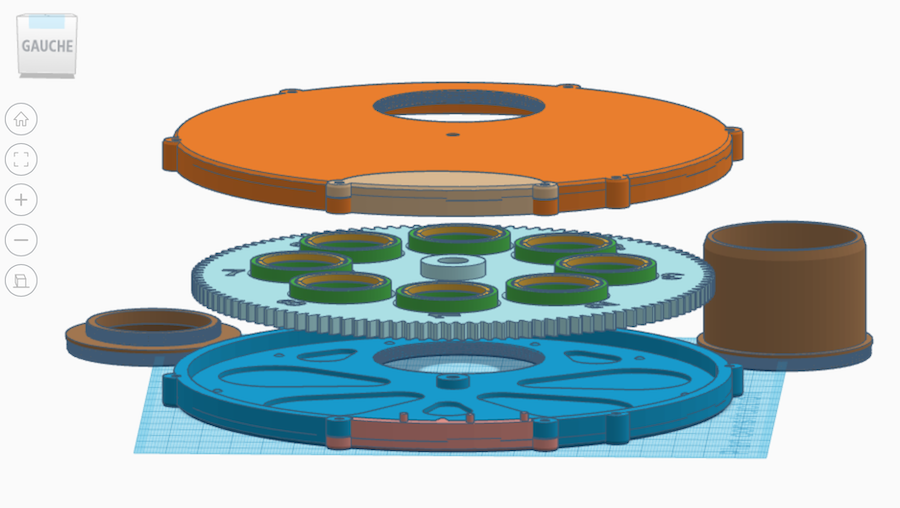
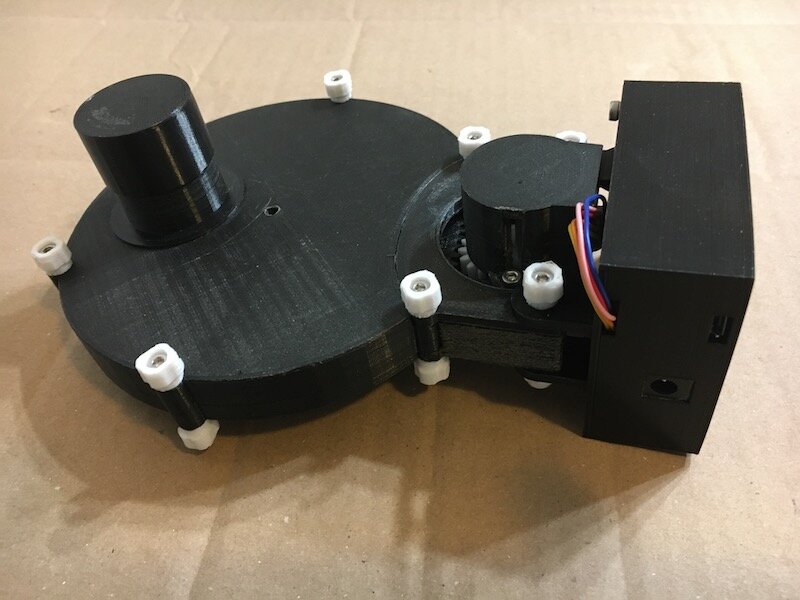
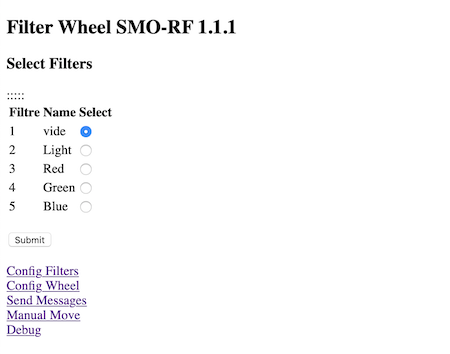
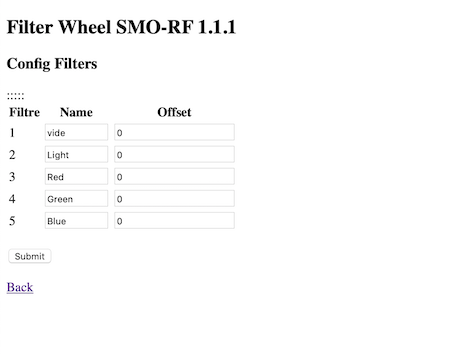
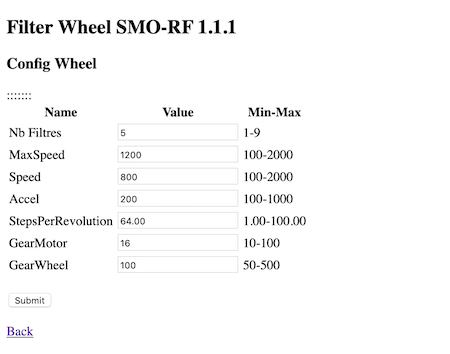
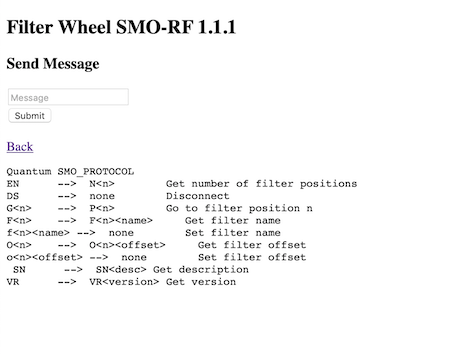
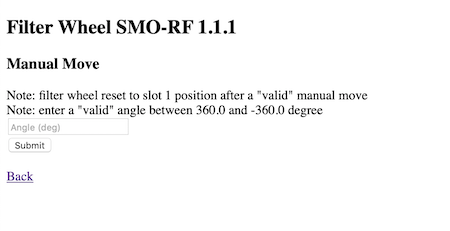
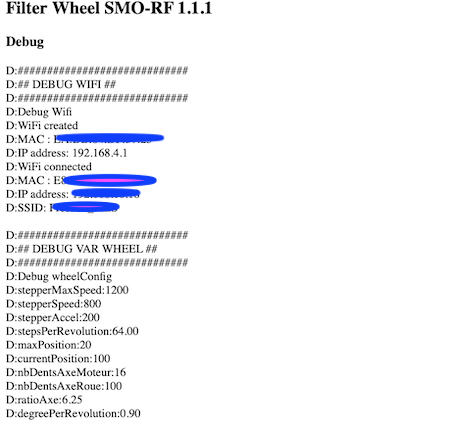
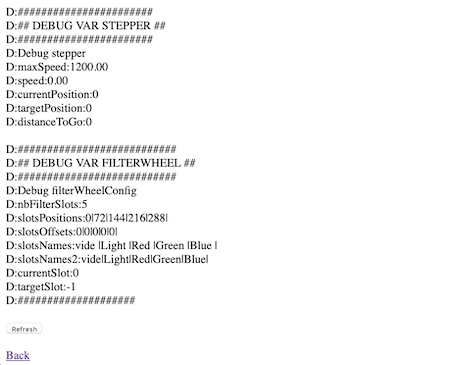
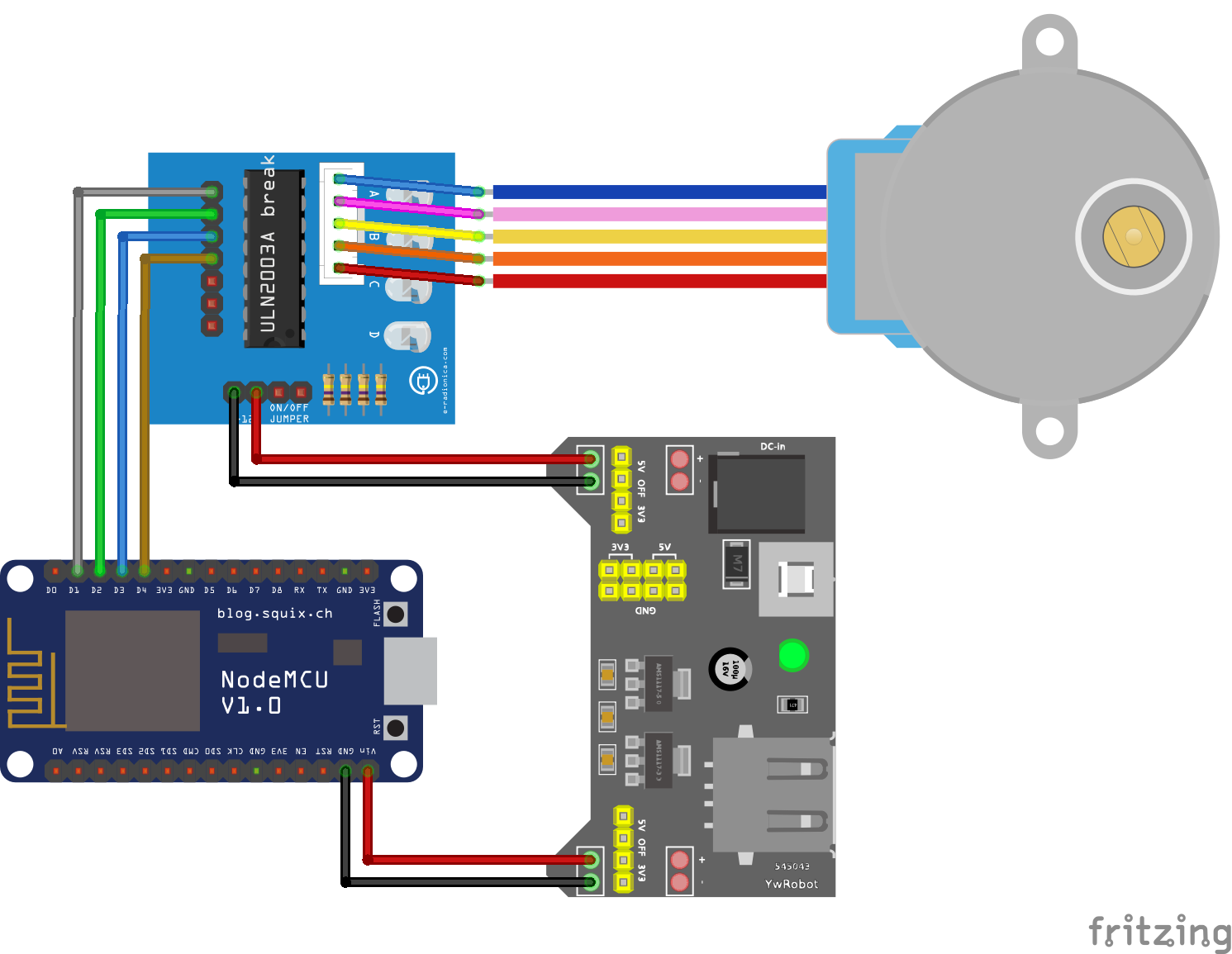
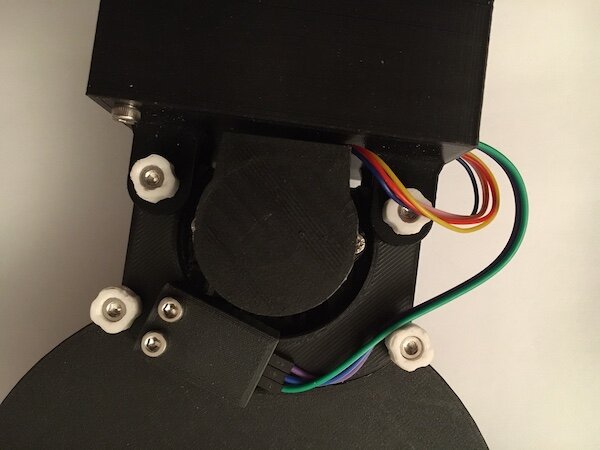
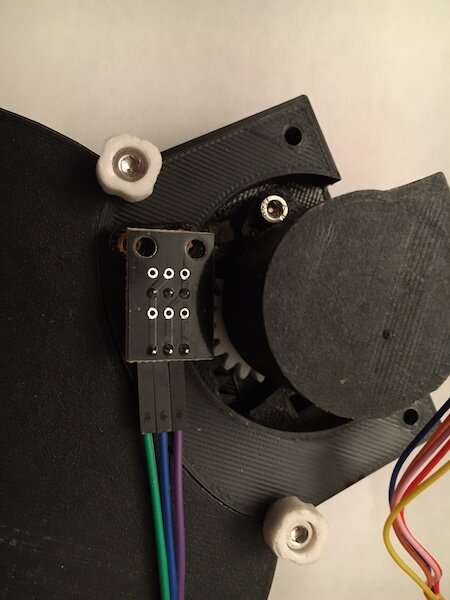
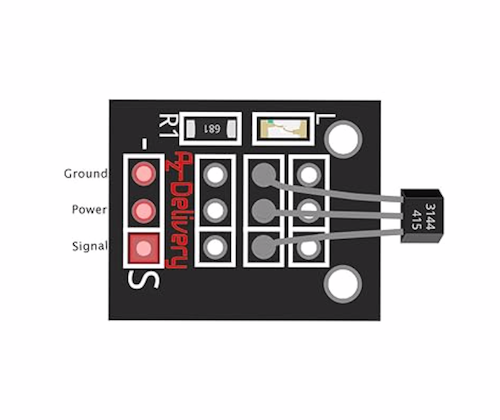
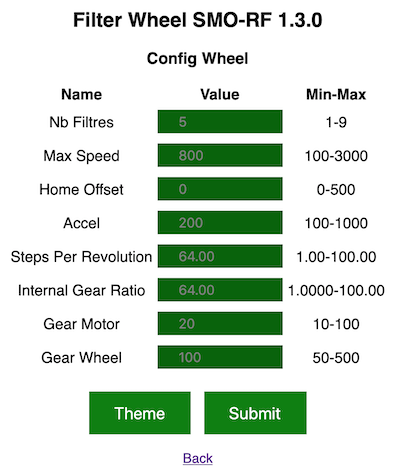
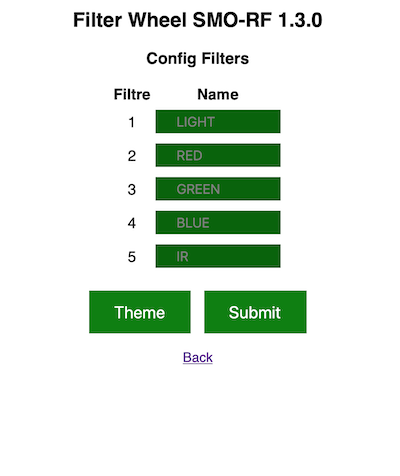
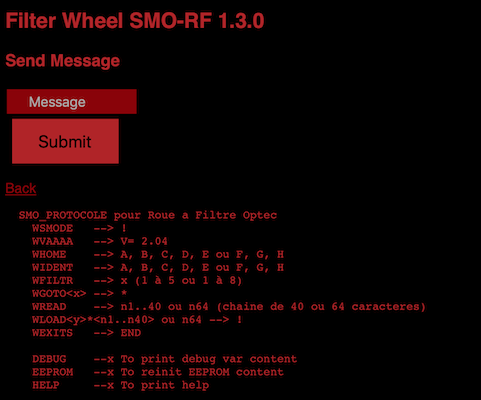
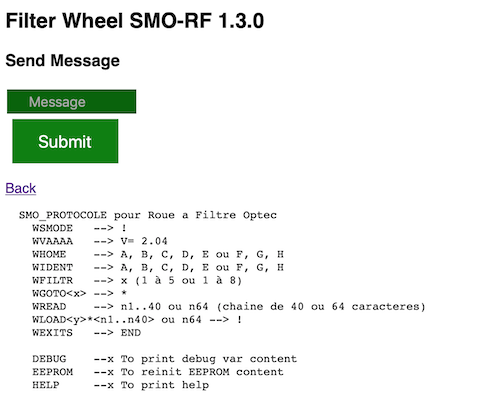
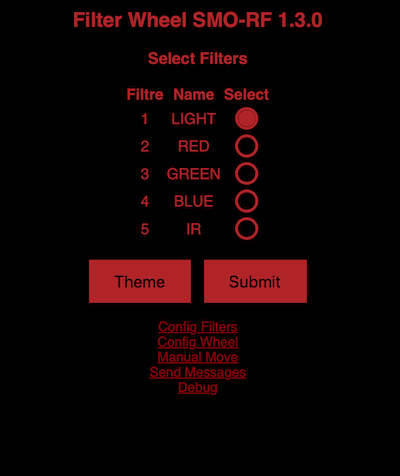
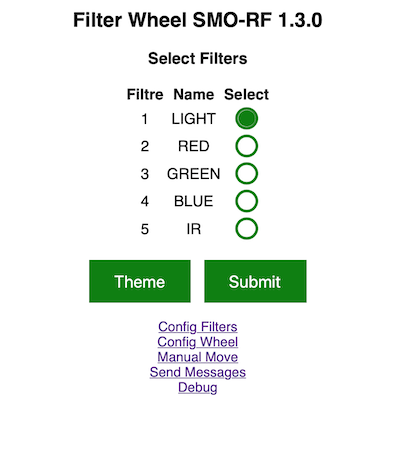
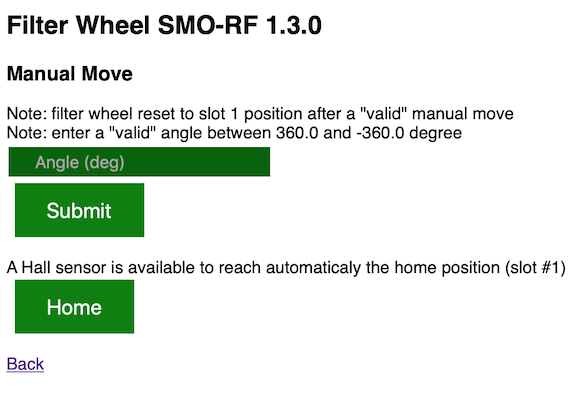
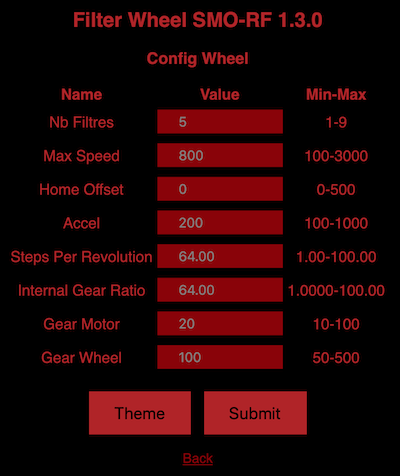
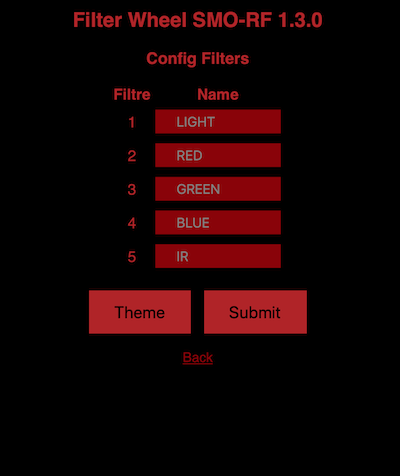
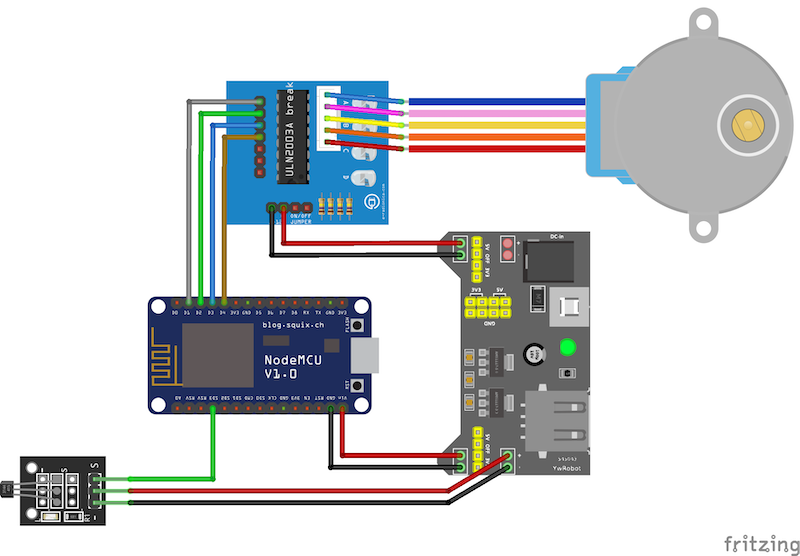
Bonjour, Je viens de poster dans les clubs "L'impression 3D en astronomie" et "Astronomie avec Arduino" les éléments nécessaires à la réalisation d'une roue a filtres imprimée en 3D, manuelle ou motorisée Chapitre 1: Les photos du bricolage Voici des photos de la version RF-42 5x1.25 pouces avec motorisation que j'utilise régulièrement (pilotée via Kstars/Ekos/Indi,la roue implémente le protocole des roues Quantum) En version manuelle, avec une petite trappe pour accéder à la roue et la faire tourner Le support moteur En version motorisée, la trappe est remplacée par le support moteur En version motorisée avec le boitier d contrôle (1 port 12V DC pour l'alimentation du moteur, un port USB micro pour le pilotage série) Une vue des différents éléments avant montage de la roue Une vue des elements de la motorisation Chapitre 2: Les modèles 3D Il y a 2 modèles, avec 3 déclinaison en tout 1) Le petit modèle, une seule déclinaison pour 5 filtres 1.25 pouces Le boitier dispose de filetages M42x0.75 m sur chaque face 2) Le grand modèle, avec 2 déclinaisons, soit pour 5 filtre d e3 pouces, soit pour 8 filtres de 1.25 pouces Le boitier dispose de filetages M54x0.75 M sur chaque face Les fichiers pour l'impression 3D des roues ) filtres sont disponibles ici Chacun des 2 modèles peut être actionné manuellement, ou doté d'une motorisation Pour l'impression en 3D des supports moteurs et du boitier de contrôle, c'est ici EDIT: ajout des fichiers STL pour les têtes de vis et boulons, pour manipuler les vis sans outils Tete vis et boulons.zip Important: les têtes de vis sont une création originale de Xavier DUPONT pour le projet SOLEX, les têtes de boulons sont une adaptation personnelle des têtes de vis. Chapitre 3: Motorisation, code de programmation et interface de pilotage Pour la motorisation vous aurez besoin d'un microcontroleur ESP8266 ou ESP32, d'un moteur 28BYJ-48 et de son stepper UNL2003 (le tout devrais vous couter moins de 20 euros). Le code est fourni ici (mis à jour version 1.1.1 le 19/10/2021) La roue est pilotable via le port USB du contrôleur, elle implémenta par défaut le protocole des roues à filtres Quantum --> a ce titre la roue a filtres est pilotable via Kstars/Ekos/Indi en utilisant ce driver INDI Avec un microcontroleur ESP8266 ou ESP32 (en lieu et place d'un Arduino tout simple), la roue a filtre généralement!re son propre réseau Wifi (comme une borne) SSID réseau: : mls-rf password: azerty adresse IP de la roue: 10.42.0.1 joignable en interface web: http://10.42.0.1 En parallèle du mode "borne" la roue peut aussi se connecter à un réseau wifi existant, vous pouvez modifier dans le code les éléments "reseau1", "password1", "reseau2" et "password2", la roue a filtre se connectera à l'un de ces 2 réseaux, au premier qui accepte la connexion, testés dans l'ordre... Voici quelques copies d'écran du pilotage en mode wifi (désolé j'ai l'habitude de programmer en anglais, comme au boulot, même si mon niveau d'anglais est mauvais ...) L'écran principal, on choisi le filtre et on valide (submit), la validation entraine le déclenchement du mouvement pour positionner le filtre choisi (les noms des filtres peut être modifié sur l'écran de config) Ci dessous l'écran de configuration pour nommer les filtres et leur attribuer un décalage (offset), qui sera utilisé par Ekos/Indi pour ajouter la mise au point selon chaque filtre Ci dessous la page de configuration Détail des paramètres: - nombre de filtres: accepte les valeurs de 1 à 9, mais en fait on utilise soit 5 soir 8 filtres - nombre de "pas par minutes" max lors de la rotation du moteur - nombre de "pas par minutes" initial au but de la rotation du moteur - nombre de "pas" pour le facteur d'acceleration (utilisation de la librairie AccelStepper) - nombre de pas pour faire un tour de moteur (habituellement avec un moteur 28BYJ-48 c'est 64) - nombre de dents de l'engrenage sur l'axe moteur (20) - nombre de dents sur le tour de la roue (100 pour le petit modèle, 120 pour le grand modele) Ci dessous la page pour envoyer manuellement des commandes (celles qui sont habituellement envoyées par le port série, pratique pour tester) TRES IMPORTANT: comme la roue a filtre ne dispose pas de mécanisme de "repositionnement automatique", si il y a désynchronisation, avec le roue qui s'arrête sur une position entre 2 filtres, l'ecran de mouvement manuel permet des ajustement en faisant tourner la roue (on choisi le nombre de degrés, en valeur positive ou négative selon le sens que l'on souhaite Et pour finir il y a une page "debug" qui présente les valeurs en cours des différentes variables du firmware Cordialement, Stéphane Edit 19/10/2021: suppression des images en doublon, mise à jour des copies d'écran du pilotage de la roue via son interface web Edit 23/11/2021: modification du schéma de câblage, livraison code microcontroleur v1.2.0 VERSION1.3 du 06/11/2023 Edit 06/11/2023: ajout d'une nouvelle pièce 3D "support haut hall" permettant d'ajouter un capteur a effet haut et livraison code microcontroleur v1.3.0 qui l'exploite Motifs sur le code: - Refonte graphique pour le site web embarqué et ajout d'un mode "nuit" (rouge/noir) - Ajout pilotage via driver Bluetooth Serie (testé OK sur Ekos/Indi) - Ajout pilotage via driver network (tcp port 1234)(testé OK sur Ekos/Indi) - Ajout capteur Hall + recherche automatique de la position du filtre 1 IMPORTANT: si vous avez déjà imprimé la version précédente de la roue et du support moteur vous n'avez pas besoin de tout réimprimer, vous devez seulement imprimer la pièce "support haut hall" (et éventuellement le "capot hall" pour protéger le capteur) Quelques images: Le support du capteur Hall (piece seule, et pièce installée sur la roue avec le capteur) Le support avec le capteur et son capot de protection Le type de capteur est un AZDelivery KF-035 (environ 7 euros les 3 capteurs sur la Zone....) Important: ce capteur dispose d'une LED qui éclaire en rouge, il est important de la masquer pour ne pas produire de lumière indésirable dans la roue à filtre ! Avec un contrôleur ESP8266 ou un ESP32 la roue peut être connectée en Wifi et pilotée via un site HTTP intégré La version 1.3.0 entraine une refonte graphique du site embarqué, voici quelques captures d'écran (le theme Dark est par défaut, mais on peut permuter avec le thème Light à la volée): Le nouveau plan de câblage avec le capteur Hall (dans le code on considère qu'il est connecté sur le port GPIO16, mais c'est configurable) Cordialement, Stéphane
 6 points
6 points -
Un long article dans Science sur les discussions entre les astronomes US et Musk, les modifications admises par Musk sur les surfaces et orientations de ses satellites, mais aussi les récents développements des actions juridiques entreprises outre-Atlantique contre les lancements de clusters de satellites. Outre des associations professionnelles d'astronomes, des juristes et -on est aux USA- des organisations représentant les intérêts des communautés indigènes indiennes s'activent. Ces dernières sont pourtant en conflit avec les astronomes au sujet de l'observatoire de Mauna Kea, une montagne sacrée pour certains. Une illustration impressionnante, mais je ne suis pas parvenu à la copier ....🤔0 point










Ce classement est défini par rapport à Paris/GMT+01:00