rmor51
-
Compteur de contenus
3151 -
Inscription
-
Dernière visite
-
Jours gagnés
4
Tout ce qui a été posté par rmor51
-
J'avais une 80ED, avec un crayford. Jamais pu utiliser l'EAF en automatique. J'ai changé pour une 94EDPH avec crémaillère. Plus aucun problème pour faire la MAP. Il faut démarrer près du point de MAP.
-
Au cas ou le pointage n'est pas bon, permet de trouver le cible simplement, en décrivant une spirale grandissante à partir du lieu pointé. Efficace, fonction que j'avais sur la raquette de la LXD75 et que je n'ai pas retrouvé sur l'AVX, puis la GEM28 et la HEM15A.
-

Session photos du même objet sur plusieurs nuits.
rmor51 a répondu à un sujet de soleil63 dans Astrophotographie
Tu dois remonter le setup à peu près comme la veille et faire une astrométrie sur une image de la séance précédente. C'est surtout l'angle de rotation qui va importer. Je ne sais pas si NINA comporte une fonction de correction manuelle de celui-ci. Je n'utilise pas NINA. -
Bonjour, quelqu'un possède-t-il ce matériel et me donner ses impressions SVP ? https://www.teleskop-express.de/en/filters-254/solar-filters-for-white-light-61/ts-optics-1-25-solar-prism-with-polarizing-and-narrowband-filter-9409
-
Accéder à un serveur INDI sur Android
rmor51 a répondu à un sujet de manwald dans Raspberry, Tinkerboard, etc... de Linux et astronomie
J'ai omis de signaler que sur le serveur Indi avec un RPI, il existe un bug, résolu depuis peut être. Lorsqu'on utilise 2 caméras du même fabricant, il n'est créé qu'un seul fichier XML ! D'où des soucis. -
Accéder à un serveur INDI sur Android
rmor51 a répondu à un sujet de manwald dans Raspberry, Tinkerboard, etc... de Linux et astronomie
Pourquoi utiliser le RPI seulement comme serveur Indi et faire tourner Kstars-Ekos sur ton PC ? Ce dernier tourne très bien sûr le RPI. le PC ne sert qu'à lancer et contrôler. Pour la Map imageur, sauf à disposer d'un focuseur motorisé, pas moyen de faire autrement que de sortir. Tu peux utiliser un smartphone ou mieux une tablette pour cette opération avec une connexion wifi par Nomachine ou Vnc. Sauf à avoir un focuseur sur la caméra de guidage, dans tous les cas il faudra aller dehors pour faire cette Map aussi. J'utilise une tablette pour le faire près du télescope. -
Caméra et filtres compatibles?
rmor51 a répondu à un sujet de Nicoastro83 dans Matériel astrophotographique
Il faut prévoir les bagues de fixation en plus des filtres je suppose. -
Caméra et filtres compatibles?
rmor51 a répondu à un sujet de Nicoastro83 dans Matériel astrophotographique
Avec des 36mm non monté ça devrait aller. Question complémentaire: comment "monter" des filtres non montés sur une RAF ? Jamais utilisé ces non montés. -
L'usage de Linux ne modifie pas la nature des câbles à employer.
-
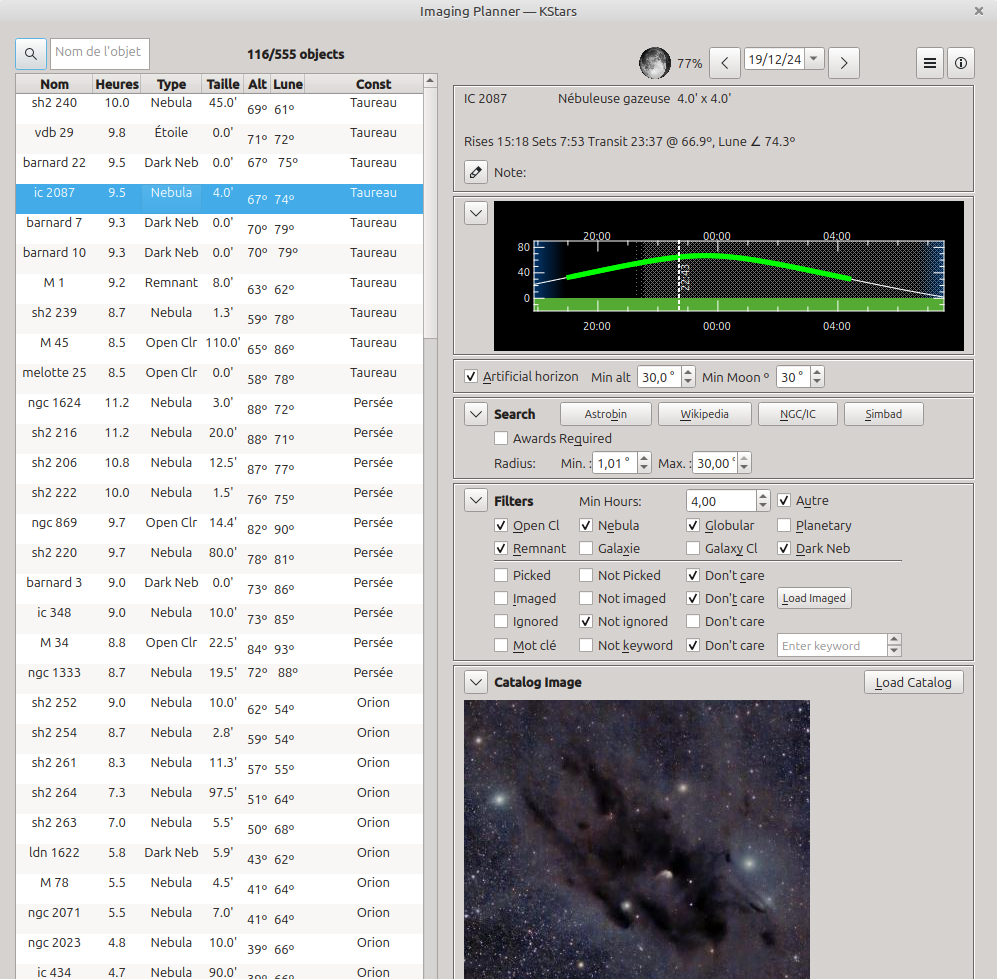
La dernière version renferme deux nouvelles fonctions. La première est une liste des observables selon plusieurs critères: date, minimum d'élévation, écart par rapport à la Lune, etc. Une fois un objet choisi, un graphique montre son élévation, son image. Des boutons permettent d'accéder à Astrobin, Simbad, NGC, Wikipedia. La seconde consiste, dans le FITSViewer, à obtenir les objets présents dans l'image avec le site Simbad. Avec un filtre, complexe, pour sélectionner les objets et un lien avec la base Simbad.

-
Montures Harmoniques, vraiment polyvalentes??
rmor51 a répondu à un sujet de Ameleo37 dans Matériel général
Finalement, je n'ai pas acheté l'AM5. J'ai pris une iOptron HEM15A, plus comparable à l'AM3 en terme de charge. La présence de la raquette traditionnelle a été déterminant dans le choix. -
Ce n'est pas simple une fois. Une fois que c'est fait c'est simple !
-
Lire le pdf joint au message. Je ne connais pas plus simple.
-
En planétaire, on prend plutôt des vidéos, avec un FPS assez élevé pour contrer la turbulence en particulier. Puis on analyse la vidéo et on empile les meilleurs images suivant un classement relatif. Les outils ne nomment Firecapture, Sharpcap pour la capture, Autostakker4, Registax6, AstroSurface, PSS, pour le traitement. Le traitement planétaire est différent de celui du CP. Même si le marketing indique que la 2600 peut faire du planétaire, elle n'est pas vraiment adaptée. Le capteur est bien trop grand, il faut donc faire du ROI au minimum pour atteindre un débit d'image ou FPS suffisant. On réglera un temps d'exposition court, quelque ms si le ciel est turbulent, quelques dizaines s'il est bon; en complément on règle le gain pour avoir l'histogramme à 70% environ.
-
Pas de MAP auto en planétaire. Allez sur une étoile proche, faire ma MAP puis revenir sur la planète. Inconvénient, déplacement possible du miroir primaire sur les SC par exemple, suffisant pour abîmer le MAP. Autre solution, rendre parafocaux un oculaire et la caméra. On fait la MAP avec l'oculaire puis on le remplace par la caméra. Avantage, pas de déplacement, l'oeil est précis pour faire la MAP sur une planète. Et ça fonctionne sans Barlow, avec Barlow et sur tous les télescopes. Parafocalisation.pdf
-
Il me manque une étape !
article a donné son avis sur un(e) Bertrand du Nord de rmor51 dans Astrophotographie
En photo, il faut un bon alignement polaire. Si on ne voit pas la polaire, les logiciels d'astrophoto savent le faire avec une étoile au voisinage du méridien sud. Cela nécessite quand même d'être bien orienté en azimuth et altitude, afin d'avoir une correction minimale. Pour cela, j'utilise 2 outils. Une règle en alu ou en bois, avec une boussole fixée dessus. L'axe N-S est perpendiculaire à la règle. Je pose la règle au sol, oriente celle-ci, puis je dispose les pieds du trépied en conséquence. Un inclinomètre pour régler l'altitude. Avec cette méthode, on est très bien orienté. Lorsque la polaire est visible, elle est dans le champ à tous les coups. Sans polaire, il existe la méthode du Bigourdan, que je n'ai jamais pratiqué. Elle consiste à laisser dériver une étoile dans le champ et à corriger avec les molettes l'azimuth et l'altitude. Çà prend une bonne demi-heure. La solution logicielle est plus rapide. Avec KSTARS par exemple, après avoir visé une étoile près du méridien sud, 3 photos sont prises avec une rotation de X degrés et astrométrer. Le logiciel en déduit un écart en azimuth et altitude, qu'il reste à corriger. NINA doit avoir une procédure similaire. -
Timeout PH2D / Ekos sur Altair GPCAM3 290c
rmor51 a répondu à un sujet de phil1789 dans Support débutants
quel temps d'exposition est utilisé pour le guidage ? -
Galaxie d'Andromède/fra 400/ Asi 2600MM
rmor51 a répondu à un sujet de julienESP dans Astrophotographie
Normal les "points" rouges rosés sur la full ? -
Quel objectif monture Sony pour l'astropaysage ?
rmor51 a répondu à un sujet de morbli dans Matériel astrophotographique
Il y a aussi le Tokina 11-16. J'en ai eu un pour Canon, le champ est excellent pour la voie lactée. Il avait un gros avantage par rapport aux concurrents. En réglant la Map en bout de course on était parfaitement au point. -
Soft pour aide focus avec masque de Bahtinov?
rmor51 a répondu à un sujet de Wan186 dans Software de Linux et astronomie
L'oeil est très précis pour le Bahtinov. -
Timeout PH2D / Ekos sur Altair GPCAM3 290c
rmor51 a répondu à un sujet de phil1789 dans Support débutants
Le pro est sur une base raspberry. Puisque ta caméra de guidage fonctionne avec le guidage interne d'Ekos, c'est un problème propre à PHD2. Tu peux aller sur le site du concepteur et soumettre ton problème, en fournissant le log. https://groups.google.com/g/open-phd-guiding -
Soft pour aide focus avec masque de Bahtinov?
rmor51 a répondu à un sujet de Wan186 dans Software de Linux et astronomie
Kstars-Ekos fait ce que tu demandes. Mais c'est plus long que de le faire en visuel. Pour un pilotage en distant, il faudrait automatiser la mise en place du masque et son retrait. Il est alors plus simple d'utiliser les processus de MAP standard. -
Timeout PH2D / Ekos sur Altair GPCAM3 290c
rmor51 a répondu à un sujet de phil1789 dans Support débutants
Comment est branché la caméra de guidage ? En ST4 ou sur la raquette ? Un guidage inférieur à +/-3 secarc est excellent. Cherchez le 0,5 voire moins est un exercice de style. J'utilise depuis le départ le guidage interne de KSTARS. Cela fait un souci de moins. Un Stellarmate Pro coûte moins cher qu'un mini-PC + Pegasus. -
Samyang 135 + ASI 533 Mc Pro: backfocus?
rmor51 a répondu à un sujet de samurai_kagemusha dans Matériel astrophotographique
Un filtre rajoute 1/3 de son épaisseur en longueur de chemin optique, si je ne dis pas de bêtise. Avec des filtres parafocaux la MAP est identique pour les différents filtres. Sinon, chaque filtre a sa propre Map. Les logiciels gèrent les écarts par rapport à un filtre de référence. -
Samyang 135 + ASI 533 Mc Pro: backfocus?
rmor51 a répondu à un sujet de samurai_kagemusha dans Matériel astrophotographique
Oui, le même que sur l'appareil photo. Il existe des raccords pour chaque marque, comme celui-ci pour Canon.