Discret68
-
Compteur de contenus
2250 -
Inscription
-
Dernière visite
-
Jours gagnés
2
Tout ce qui a été posté par Discret68
-
 Si le rapport f/d indiqué dans le logiciel est une valeur résultante (parce que ce sont le diamètre et la focale qui constituent les valeurs d'entrée), alors effectivement, le fait que cette valeur soit à 6, on s'en moque.
Si le rapport f/d indiqué dans le logiciel est une valeur résultante (parce que ce sont le diamètre et la focale qui constituent les valeurs d'entrée), alors effectivement, le fait que cette valeur soit à 6, on s'en moque. -
Effectivement, malgré cette zone non aluminée, il faut bien rester sur un miroir de 260mm de diamètre. Ce "manque" d'aluminure ne modifie pas la courbure et le rapport f/d du miroir.
-
Oui, c'est bien mon prénom. Je ne sais pas si la "démontabilité" est un réel critère dans ton cas car comme tu veux installer ton tube sur une EQ6, ton setup complet ne tiendra pas dans un sac de voyage. Mais bon, si tu préfères un serrurier et que tu peux le construire, suis cette voie ! Coté achat d'un tube carbone, effectivement, le tarif est important. Il faut néanmoins prendre en compte tous les arguments qui peuvent guider le choix : le tarif bien sûr, la facilité de mise en œuvre, la rigidité, la dilatation (quasi nulle pour du carbone), .... Il doit être possible de demander à Teleskop Express un tube seul. Il suffit de leur envoyer un mail en précisant les dimensions. Vu tous les diamètres des télescopes qui sont proposés, il y a de quoi faire. Lorsque j'ai acheté mon newton de 300 f/d 4 chez eux, je suis parti sur du sur-mesure. Je pense néanmoins que les diamètres sont standards car il faut des supports pour enrouler la fibre. par contre, pour la longueur, c'est juste de la coupe à faire. Il existe d'autres fournisseurs, mais plutôt aux Etats-Unis. Une recherche sur le net permet de sortir quelques sites ad'hoc.
-
Construire ses propres équipements est toujours une source de plaisir. Je n'arrête pas non plus de concevoir et d'usiner des systèmes pour mes différents setup. Néanmoins, qu'est-ce qui t'as motivé pour retenir une structure serrurier plutôt que de prendre un tube ? En général, pour un miroir de ce diamètre, et surtout vis-à-vis de son poids (modeste), le serrurier ne présente pas d'avantage par rapport aux tube. Le poids du serrurier est généralement plus important que pour un tube, et d'une complexité accrue. Pour un miroir de grand diamètre, donc lourd, les contraintes amènent effectivement vers un serrurier plutôt que vers un tube. En prenant un tube carbone, tu serais gagnant en termes de poids, rigidité, dilatation, ... A un moment, dans la discussion, tu cherches du tube inox. Voici des fournisseurs de métaux auxquels je m'adresse assez régulièrement : https://www.metalaladecoupe.com/ https://www.acier-detail-decoupe.fr/ Il y a également d'autres fournisseurs occasionnels : http://www.qualichutes.com/catalogue.html Pour la visserie, 2 sites qui proposent des vis à l'unité à un prix intéressant des délais courts et des frais de ports "honnêtes" : http://www.mavisserieaudetail.com/ https://www.bricovis.fr/ JP
-
Avis résistance chauffante pour support de miroir secondaire Newton
Discret68 a répondu à un sujet de VIVARECH dans Matériel général
Tes calculs sont bons. rmor51 s’est trompé en utilisant la tension (9V) à la place de l’intensité dans la formule qu’il a lui même énoncé. Sur mon newton de 300 avec un secondaire de 100, j’ai une résistance qui dégage 5w de puissance. A la base c’est une résistance de 20W sous 24V qui est destinée à l’aviculture pour éviter que les gamelles d’eau ne gèlent. Comme quoi !!! C’est une résistance gainée inox qui ne craint pas l’eau .... ou la rosée. Elle est collée au dos du secondaire à l’aide de silicone. Alimentée en 12V, sa puissance tombe à 5W (U2/R), ce qui est largement suffisant pour éviter toute condensation. -
Tu es venu passer quelques jours en Plaine d'Alsace ? 😃 Ah ben non, tu n'as pas fait référence à de la pollution lumineuse 😫 Ici, les conditions que tu décris sont presque habituelles. J'exagère à peine 😉 En tout cas, tu as quand même la tête de cheval sur la pellicule et rien que ça, c'est déjà un motif de satisfaction.
-
Bon, je vais tous vous mettre d'accord : je n'aime ni l'impression 3D perso, ni la découpe au cutter. Par contre, avec une découpe laser, c'est bien plus propre
-
Pour aller un peu plus loin sur les facteurs de variations de la température à la surface de la terre, je t'invite à regarder cette vidéo qui explique les différentes variations de l'orbite terrestre autour du Soleil et leur impact sur la température ressentie : D'une manière générale, tu cherches selon les critères "précession équinoxe" ou "cycle Milankovitch" pour avoir plus de vidéos disponibles.
-
Le problème avec Taka, c'est qu'ils utilisent des diamètres que personne d'autre n'utilise, ce qui verrouille les possibilités. En M56 entrée et sortie, je ne vois que Taka qui propose une bague qui peut convenir, la réf 81 qui est à 49€ et qui représente la solution la moins onéreuse.
-
Il est difficile de faire le lien entre ton problème et la situation que montre ta photo. Dans ton cas, qu'entends tu par "il manque de l'allonge" ? Ta photo montrant un focuser complétement rentré, on ne voit pas trop le problème réel. Est-ce un problème de respect de la distance de back-focus du correcteur ? Car à part nous faire un inventaire des pièces de ton montage, tu me précises pas si la distance est respectée ! Pour info, le collier rotatif se monte directement à la sortie du tube (en amont du correcteur). J'ai également une FS60 avec un correcteur Taka de 56,2mm de BF (qui est respecté) et un collier rotatif Taka en amont. Aucun problème pour faire la MAP.
-
soft n.i.n.a. - nighttime imaging 'in' astronomy
Discret68 a répondu à un sujet de La Louche du Nord dans Astrophotographie
C'est bon car pour 1 tour de molette avec 12mm de course, le moteur fait 4000 pas, soit une résolution de 12/4000 = 3 microns par pas. Tu es bien en deçà des 12 microns recommandés ! Donc, pas de soucis à priori. Le moteur est un 48 pas, car vu qu'il fait 4000 pas/tour avec une réduction de 83,33333, ça fait 4000/83,3333 = 48 ! Il faut également que tu prennes de quoi fixer le moteur ainsi qu'un accouplement élastique au diamètre de l'axe de ton focuser. Et si nécessaire, une alimentation 12V. On verra après pour les réglages de NINA. -
soft n.i.n.a. - nighttime imaging 'in' astronomy
Discret68 a répondu à un sujet de La Louche du Nord dans Astrophotographie
Appelles plutôt le Vatican Blague à part, le type de moteur PAP dépend de ton focuser actuel. Pour que la focalisation automatique puisse se faire (avec NINA ou autre logiciel), il faut respecter certaines conditions, notamment la résolution du moteur PAP. Selon ton instrument, il se peut (c'est probable) qu'il faille un moteur PAP avec une réduction. Pour faire "assez simple", il faut déterminer ce qu'on appelle la CFZ( Critical Focus Zone) qui se calcule en prenant la formule simplifiée suivante : rapport f/d de ton tube au carré que multiplie 2,4. Cette CFZ est donnée en microns. Exemple : un tube dont le rapport F/d est de 5 présente une CFZ de 52 x 2,4 soit 60 microns. Pour faire une MAP auto, une première condition est d'avoir une résolution de la motorisation/réduction te permettant de l'ordre du cinquième de la CFZ, soit 60/5 soit 12 microns. En conséquence, il faut arriver à ce qu'1 pas moteur déplace ton train optique au plus d'environ 12 microns. Si le déplacement est inférieur, aucun soucis. A titre de comparaison, mon focuser a une résolution de 0,053 microns par pas. C'est très précis, mais ça sert pas à grand chose si ce n'est à prendre du temps pour tout déplacement. Il faut également connaitre la valeur de déplacement de ton focuser. Pour 1 tour de molette, quel est le déplacement du focuser. Après, on peut déterminer le type de moteur à utiliser afin d'obtenir le meilleur fonctionnement possible. Un moteur pas à pas standard a généralement une résolution de 200 pas par tour. Il est possible de faire tourner un moteur PAP en utilisant des micro-pas, ce qui permet d'augmenter la résolution. en utilisant un moteur PAP en 16ème de pas, on obtient une résolution de 3200 pas par tour, mais ça peut ne pas être suffisant. Il existe également des moteurs PAP à résolution moindre mais équipés d'uu réducteur. Par exemple, un focusCube V2 de chez Pegasus présente 5760 pas par tour. Soit dit en passant, le boitier de PA auquel tu ajoutes tous les accessoires présente un tarif qui s'approche d'un FocusCube V2 (288€). A réfléchir ! Si tu nous décris ton système, on pourra mieux te conseiller. -
soft n.i.n.a. - nighttime imaging 'in' astronomy
Discret68 a répondu à un sujet de La Louche du Nord dans Astrophotographie
Ben voilà, on y voit un peu plus clair ! Dans la notice de ce boitier, on peut lire ceci : De cette phrase, on peut donc en déduire qu'il est possible d'utiliser ce type de boitier avec un moteur à courant continu et avec NINA. Par contre, à mon avis, avec un moteur CC, ce système ne peut pas être fiable. Avec un moteur pas à pas, on peut savoir en permanence à quelle position se trouve le moteur, pour peu qu'il n'y ai pas de saut de pas (exemple : lorsque le couple demandé supérieur au couple possible du moteur). Dans le pilotage d'un moteur PAP, on envoie généralement un nombre d'impulsion pour avoir une rotation. A un nombre d'impulsion donné correspond une rotation donnée. Tant qu'on respecte les caractéristiques du moteur, on est sûr à plus de 99% de la reproductibilité de la position. Pour se prémunir des éventuels sauts de pas, certains moteurs PAP embarque un codeur qui permet de confirmer la bonne rotation voulue. Avec un moteur CC, la vitesse dépend de la tension d'alimentation. La moindre variation de tension se traduit par une variation de vitesse et au bout d'un laps de temps, le nombre de tours réalisés n'est pas le même et la position différente. la vitesse de rotation est également influencée par la variation de couple que le moteur doit fournir. Selon la portion du ciel visée, le poids du train optique va engendrer un effort variable et donc un couple variable. C'est un peu la problématique générale des moteurs CC On peut définir une pseudo-résolution du moteur CC par logiciel, mais cela ne me parait pas fiable. Dans la pratique, pour l'utilisation d'un moteur CC associé au besoin d'une précision de position, on utilise un codeur ou un générateur d'impulsion en bout d'arbre. Compter les impulsions permet de piloter le moteur d'une manière fiable. C'est une boucle de retour. Bref, j'aurais tendance à déconseiller l'utilisation d'un moteur CC avec ce type de boitier pour faire de la MAP auto avec un logiciel. A contrario, ce type de motorisation est tout à fait utilisable sans problème en visuel puisque c'est l’œil qui assure la boucle de retour. A mon sens, si tu ne veux pas être embêté, prend plutôt un moteur PAP pour avoir un système fiable. Tu peux appeler Pierro-Astro pour en avoir le cœur net.
-
soft n.i.n.a. - nighttime imaging 'in' astronomy
Discret68 a répondu à un sujet de La Louche du Nord dans Astrophotographie
C'est clair comme du jus de chique ta réponse ! C'est quoi un moteur normal vu de chez toi ? Comme si il existait des moteurs anormaux !! -
soft n.i.n.a. - nighttime imaging 'in' astronomy
Discret68 a répondu à un sujet de La Louche du Nord dans Astrophotographie
Qu'entends tu par "simuler un moteur PAP" ? Dans quel but ? Ce boitier est justement fait pour connecter un moteur CC ou PAP afin de faire de la focalisation pilotée par un logiciel (NINA ou autre). -
Plus petit que l'Arduino Nano, ça existe, mais c'est pas gagné !
Discret68 a répondu à un sujet de Discret68 dans Discussions de astronomie avec arduino
OK. Faudra que je me jette à l'eau. La programmation sur Arduino ne me pose pas de réel problème. Il faut juste que je comprenne le mode de construction du driver. Il y a de l'aide en ligne, ça devrait le faire 😉 -
Plus petit que l'Arduino Nano, ça existe, mais c'est pas gagné !
Discret68 a répondu à un sujet de Discret68 dans Discussions de astronomie avec arduino
Par hasard, tu n'aurais pas développé un driver ASCOM ? Car c'est la prochaine étape en ce qui me concerne. Je peux piloter le rotateur à distance, mais l'intérêt ultime est de pouvoir l'utiliser avec NINA en positionnement par astrométrie. Pour le rotateur 2", vu qu'il y a juste un porte-filtre et une ASI2600, le corps et le couvercle seront en impression 3D. Pour le 3", le train optique étant relativement lourd (correcteur 3", RAF, et ASI2400MC), il faut une mécanique rigide. -
Plus petit que l'Arduino Nano, ça existe, mais c'est pas gagné !
Discret68 a répondu à un sujet de Discret68 dans Discussions de astronomie avec arduino
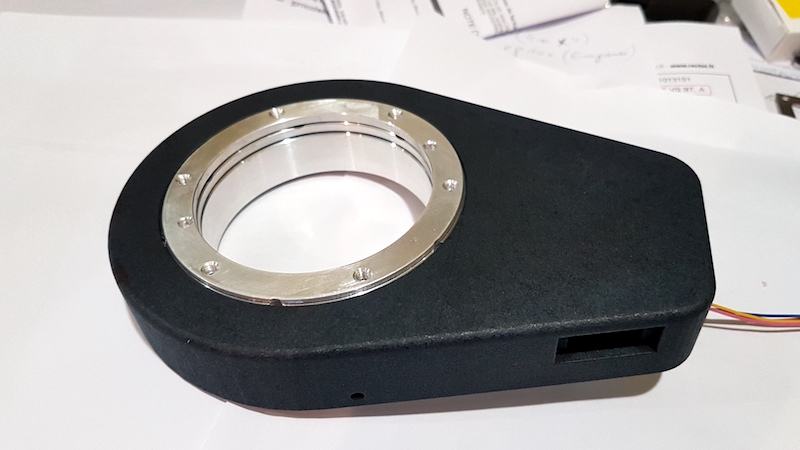
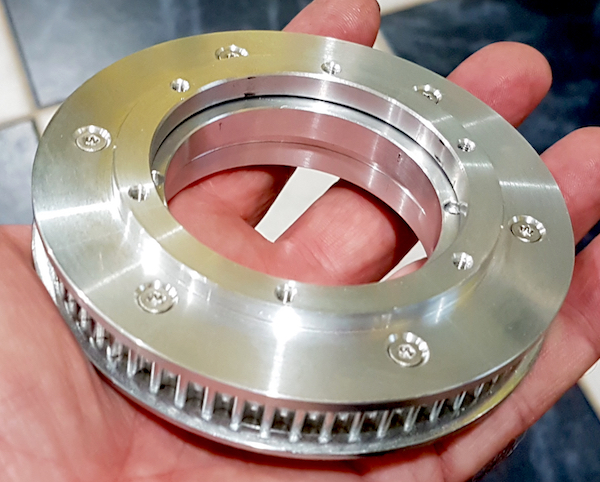
Non, aucun port n'apparait à aucun moment dans l'IDE Arduino. De toute façon, à la relecture de la documentation, on trouve cette info (traduite) "Même si Trinket a un connecteur USB, il n'a pas de capacité "console série", vous ne pouvez donc pas utiliser série pour envoyer et recevoir des données vers/depuis un ordinateur ! Il n'apparaîtra pas en tant que PORT dans le menu de configuration" En conséquence, cette carte ne peut être utilisée pour un pilotage des actions par un PC. Je pense qu'on peut y charger un programme (quand on y arrive) qui doit être autonome et sans retour vers un ordi. Exit de la course ! J'ai vu effectivement, je vais en commander un exemplaire pour tester. Vu toutes les particularités des différentes cartes, ça risque d'être un long périple pour trouver un remplaçant de taille réduite de l'Arduino Nano. J'en ai trouvé, mais pas dont les dimensions sont réduites par rapport à l'Arduino Nano. Dans l'expectative, j'ai légèrement augmenté la taille du boitier du rotateur 2" de manière à loger l'Arduino Nano. Pour le 3", vu que l'ensemble est pratiquement terminé, il va falloir que je patiente pour trouver une carte plus petite ou que je ruse. J'ai toujours la possibilité de mettre un petit boitier externe pour y loger l'Arduino Nano, mais si je peux éviter, j'aimerais autant. Juste pour le fun, une petite photo de la partie mécanique du rotateur 3" (anodisation à venir) à 2 roulement à billes, sans et avec le capot imprimé 3D : Et la partie mécanique (fixe et tournante) du rotateur 2" qui utilise un roulement unique à double rangée de rouleaux croisés, réputé sans jeu :
-
Plus petit que l'Arduino Nano, ça existe, mais c'est pas gagné !
Discret68 a répondu à un sujet de Discret68 dans Discussions de astronomie avec arduino
Je pense que c'est ça qui ne va pas pour le moment. Sur le guide d'installation ( https://learn.adafruit.com/introducing-trinket/starting-the-bootloader ), les liens fournis mènent à pas grand chose de téléchargeable. Et je ne sais pas où aller pour charger ce fameux bootloader pour une carte avec USB. J'ai trouvé de nombreux sites qui décrivent la façon de faire quand on a juste le circuit intégré, mais pour une carte avec puce soudée, je cherche encore ..... -
Plus petit que l'Arduino Nano, ça existe, mais c'est pas gagné !
Discret68 a répondu à un sujet de Discret68 dans Discussions de astronomie avec arduino
OK pour faire fonctionner un ATtiny en autonome, mais pour le faire dialoguer avec un PC en permanence, il faut bien un interface USB ! Et là, je ne vois pas ce qui est nécessaire. -
Développement driver ASCOM
Discret68 a répondu à un sujet de waogll dans Discussions de astronomie avec arduino
Bon, ben y’a plus qu’à😉 -
Plus petit que l'Arduino Nano, ça existe, mais c'est pas gagné !
Discret68 a répondu à un sujet de Discret68 dans Discussions de astronomie avec arduino
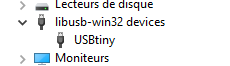
Salut Manu. Ce module ne transite pas par un port COM, il est géré directement par l'USB en tant qu'interface USB et pas comme un port COM comme pour les autres modules. Dans ce tuto sur l'utilisation de ce module ( https://learn.adafruit.com/introducing-trinket/setting-up-with-arduino-ide ), il est bien précisé qu'il n'y a pas utilisation de port COM. Je sélectionne la carte Adafruit Trinket (ATtiny85 @ 8MHz)et le programmeur USBtinyISP, mais j'ai mon message d'erreur. Dans le sélecteur de carte, il n'y a effectivement aucun port COM listé. Dans le gestionnaire de périphériques de Windows, on le trouve bien dans la liste des périphériques, mais pas dans les ports COM :
-
Bonjour à tous les bricoleurs sur Arduino. Dans le cadre de la conception/fabrication de rotateurs (2" et 3") pilotés par un Arduino, vu que pour piloter un unique moteur pas à pas via un driver (DRV8825 ou TMC2208), 3 sorties numériques sont nécessaires (Enable, Step et Dir), un Arduino, même Nano présente une profusion de sorties parfaitement inutiles pour un unique moteur PAP. L'utilisation en mode micro-pas pilotés n'est pas indispensable. la sélection peut se faire une fois pour toute au niveau du driver en fonction de la vitesse de rotation souhaitée. De plus, même si l'Arduino Nano est de petite taille, il est encore un peu grand par rapport au volume disponible. Certes, je peux augmenter la taille du système, mais si je peux faire avec plus petit, j'aimerais autant. J'ai commencé par tester le programme de pilotage de mes rotateurs sur un Arduino Nano. Pour le moment, je pilote la rotation du système via un programme développé en VB.net. A termes, j'envisage également de basculer sur un driver ASCOM que je dois développer, après apprentissage de la chose ! Bref, la programmation fonctionne et le premier des 2 rotateurs construit..... tourne quand on lui demande. J'ai fait quelques recherches sur le Net pour trouver plus petit que l'Arduino Nano et qui soit compatible avec l'IDE Arduino. L'objectif étant de pouvoir déverser mon programme Arduino dans un module plus petit en limitant le nombre de modifications du programme. J'ai trouvé la carte Beetle RP2040 DFR0959 ( https://www.gotronic.fr/art-carte-beetle-rp2040-dfr0959-35875.htm ) qui propose 8 E/S. L'installation des drivers a été effectuée sans problème. La connexion et le téléversement du programme se réalisent sans soucis. Je pilote le driver et le rotateur tourne comme il se doit. Le seul point noir auquel je n'avais pas fait attention est que ce module ne contient pas d'EEPROM. Vu que je stocke la position du rotateur lors de la déconnexion du système pour la retrouver à la connexion suivante, dans ce cas, aucune position n'est mémorisée. On oublie donc ce module pour le moment ! J'ai pris un autre module, le Trinket 5V ADA1501 ( https://www.gotronic.fr/art-module-trinket-5v-ada1501-21898.htm ) qui est compatible IDE Arduino (sur le papier), qui comporte une EEPROM qui me permettrait de stocker mes données hors tension. De plus, il occupe la moitié de surface d'un Arduino Nano. J'ai suivi la procédure d'installation et pour le moment, impossible de téléverser le moindre octet ! J'ai un message d'erreur qui me dit "A programmer is required to upload". J'ai essayé plusieurs programmeurs dont l'USBtinyISP, mais rien n'y fait. Sur ce module, il y a 2 choses qui m'intriguent au niveau de l'installation. C'est le fait qu'il n'y ai pas de numéro de port COM, mais ça, c'est normal, et également une histoire de bootloader que je pense ne pas avoir compris. Si quelqu'un a déjà mis en œuvre ce module pour m'aider à le faire fonctionner, je lui en serai reconnaissant. JP
-
Développement driver ASCOM
Discret68 a répondu à un sujet de waogll dans Discussions de astronomie avec arduino
Je ne vais pas pouvoir t'aider pour le moment, mais comme j'ai également besoin de développer un driver ASCOM pour 2 rotateurs et 1 focuser pilotés par Arduino, je vais lancer l'installation des outils et voir ce que ça donne ! On verra si ça se passe mieux (ou pas) chez moi. -
Que veux tu dire par "en me battant avec le plate solve" ? De quoi est constitué ton équipement (monture, tube, caméra, ...) ?