Discret68
-
Compteur de contenus
2252 -
Inscription
-
Dernière visite
-
Jours gagnés
2
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par Discret68
-
A mon avis, il ne doit pas s'en vendre fréquemment. Aussi bien je comprends l'utilité sur une monture légère de table pour laquelle moins on touche, mieux c'est, mais pour une monture plus lourde, donc sur un trépied ou un pilier, je n'en vois pas vraiment l'utilité. La seule utilité que j'y vois, c'est éventuellement pour reprendre la MES sur un remote grande distance et là, ça ne concerne vraiment plus grand monde, d'autant qu'une perte de MES sur une installation en fixe pour laquelle on intervient que très rarement, je ne vois pas pourquoi il y aurait perte progressive de la MES.
-
Effectivement, merci pour le lien, je n'avais pas vu les différents addons ! Cela répond en partie aux questions que je posais à Axeldark. Après, ce système peut être pertinent pour de petites montures avec une charge faible. Mais ça peut être effectivement un bon complément pour simplifier la MES, d'autant que cette petite monture est faite pour être posée sur quelque chose de plat, et avec son faible poids, on arrive vite à la déplacer plus que de raison en voulant effectuer un réglage.
-
De quelle motorisation parles tu en terme d'innovation ? Où as tu vu qu'il y a une mise en station automatique ? Il y a bien du GoTo et l'utilisation de logiciels tiers (Nina ou SharpCap) pour aider à la MES, mais je ne vois là aucun automatisme. Idem, de quelle motorisation parles tu ? Ben là, je n'ai rien compris de ce ce que tu veux dire !
-

Choix porte oculaire pour C11 et focale resultante
Discret68 a répondu à un sujet de tazdevil71 dans Matériel astrophotographique
De par les explications données, Il semble en fait qu'avec un SCT équipé d'un focuser "externe", tu disposes d'une marge de réglage assez importante concernant le rapport f/d de l'optique. Il faut positionner le primaire en fonction du rapport f/d souhaité. Et si nécessaire compenser par des bagues en amont du réducteur de manière à compenser le déplacement du foyer. En faisant une résolution astrométrique sur les photos, tu peux connaitre précisément la focale résultante (avec ou sans le réducteur). Tu peux ainsi modifier le rapport f/d progressivement. -
Choix porte oculaire pour C11 et focale resultante
Discret68 a répondu à un sujet de tazdevil71 dans Matériel astrophotographique
Salut Taz Voici 1 article qui te permettra d'appréhender la relation entre focale et position du miroir primaire sur un SCT. C'est là qu'on se rend compte que l'utilisation d'un focuser externe est pertinent : - https://saplimoges.fr/variation-de-la-focale-dun-schmidt-cassegrain-avec-sa-mise-au-point/ JP -
Choix difficile de la lulu
Discret68 a répondu à un sujet de SpaceTramp dans Matériel astrophotographique
Bien sûr. La majorité des montures sont vendues sans trépied, ce dernier restant une option. Ce qui serait bien, c'est que tu répondes au questions qui te sont posées ! Sinon, on tourne en rond. -
Choix difficile de la lulu
Discret68 a répondu à un sujet de SpaceTramp dans Matériel astrophotographique
Une question qui me taraude vu que tu interroges sur le choix de la monture. As tu le matériel dont tu établis la liste (dont la 183MM) ou c'est ce qu'on appelle une liste pour le Père Noël, c'est à dire ce que tu penses acheter ? Car prendre un capteur mono avec des filtres SHO vont te "condamner" à faire des nébuleuses. Exit les galaxies, les amas, ... sauf à compléter par un lot de filtres LRVB. Il est effectivement préférable de prendre une lunette avec correcteur dissocié afin de te donner la meilleure souplesse. De toute façon, vu les focales auxquelles tu fais référence, un réducteur de focale n'est assurément pas nécessaire, ou dans très peu de cas de nébuleuses hyper étendues. Sachant qu'avec les logiciels d'acquisition, il est possible de faire des mosaïques pour prendre un objet vaste. Mais ça reste assez exceptionnel. Pour les filtres, tu peux investir autant que pour le reste du matériel, c'est ton droit, mais je ne suis pas convaincu que tu en profites pleinement. Il est préférable de retenir des filtres un peu moins performants et nettement moins cher pour ventiler l'argent "économisé" vers un autre équipement ; la monture notamment, qui est quand même pratiquement l'élément primordiale. On dit couramment que dans un setup, la monture représente la moitié de l'investissement total. Tu prendras plus ton pied (surtout tu seras moins enquiquiné) avec une lunette de moyenne gamme et une bonne monture que l'inverse. Pour la monture, si tu n'en as pas pour le moment, tu peux trouver une monture d'occasion, qui te permet d'avoir de meilleures caractéristiques et ce au même tarif qu'une monture neuve de catégorie inférieure. On trouve de bonnes occasions. Au fait, j ne vois pas de motorisation pour le focuser dans ta liste. C'est un accessoire également à prendre en compte. -
Choix difficile de la lulu
Discret68 a répondu à un sujet de SpaceTramp dans Matériel astrophotographique
Attention à ne pas résumer le choix d'une focale à ce critère ! Sinon, tout le monde utiliserait un rapport f/d très court (un RASA par exemple). C'est un des critères de choix. Comme tu le précises bien dans ton message, la taille de l'objet dépend de la focale, il faut donc bien prendre conscience de ces 2 critères (parmi d'autres) dans le choix de la focale et de tout ce que cela implique. Vu la liste des objets cités par SpaceTramp (perso, j'élimine déjà la moitié de droite), il faudrait plusieurs focales pour optimiser le capteur. Ou choisir la focale en fonction de l'objet le plus vaste et se retrouver avec des images de petite taille pour les objets plus petits. Bref, la focale "passe-partout", ça n'existe pas. Et encore moins en utilisant une barlow pour faire du CP. Par contre, OK pour le réducteur de focale. Je suis conscient que j'ai tout et rien dit. Le mieux est de simuler différents instruments sur du cadrage de cibles. Il existe plusieurs sites internet qui permettent de faire ce genre de chose, mais comme je ne les utilise pas, je ne me rappelle plus de ces sites 🤔 Je suis sûr que d'autres astrams sauront nous donner les bonnes adresses. En ce qui me concerne, j'utilise C2A comme logiciel de cartographie. Il est possible de définir plusieurs repères de champs qui prennent en compte la focale de chaque instrument et les caractéristiques des capteurs. Ainsi, on peut voir directement ce que donne un objet sélectionné sur la surface du capteur. En logiciel d'acquisition, j'utilise NINA qui fait la même chose en plus précis et qui permet de peaufiner le cadrage de l'objet. On voit immédiatement si l'objet est compatible ou non avec l'instrument. Dans mon cas, pour avoir accès à un maximum de cibles (et pas toutes), j'ai fait le choix d'un newton de 300 en f/d4 soit 1200 de focale et une lulu de 80 à 480 de focale. Si nécessaire, j'ai encore une FS60 et un A7S/Samyang135 pour faire du champ très large. La lulu me permet de photographier les grands objets (M31, M45, ..) ainsi que les nébuleuses ayant une grande surface. Le newton fait le reste (galaxies, petites nébuleuses) avec effectivement des limites concernant les objets de très petite taille. Dans ce cas, je suis plus sur du champ galactique (amas de galaxies lointaines, ...). N'oublions pas effectivement (comme le précise chinois02), la charge admissible par la monture. Si la FS60 dispose d'une excellente optique, le focuser est franchement limite. Mais au tarif proposé, on peut difficilement mettre mieux. Il est pratiquement nécessaire de le remplacer par du costaud. En plus, vu que c'est une crémaillère, il faut un sacré rapport de réduction coté motorisation pour pouvoir disposer d'une MAP au réglage fin. -
OAG L + porte filtre M54, une bonne âme peut-elle m'aider...
Discret68 a répondu à un sujet de Phil49 dans Matériel astrophotographique
Je n'ai jamais compris pourquoi ZWO se focalise autant sur cette valeur de backfocus donnée à 55mm. La valeur de backfocus ne dépend que du modèle de correcteur ou aplanisseur qu'on utilise et elle doit être précisée par le fabricant. C'est cette valeur qu'il faut respecter et pas forcément la valeur de 55mm qu'indique ZWO. Sauf bien entendu, si le correcteur qu'on monte demande un backfocus de 5mm, cas du GPU par exemple ! En fait ZWO met un peu le bordel en faisant référence à cette cote de 55mm !!! Après, il est évident qu'une fois les différents constituants fixés entre eux, il faut ajouter les entretoises pour que le tirage corresponde au backfocus du correcteur ou aplanisseur utilisé, sachant que la valeur indiquée par le fabricant est théorique et qu'elle peut varier légèrement. Il faut faire des photos et les examiner pour vérifier la nécessité ou non de corriger le tirage. Il est souhaitable de disposer de bagues à visser de différentes longueurs et de rondelles minces. Ces dernières se placent entre les bagues pour pouvoir corriger la longueur de l'ensemble. -
Jupiter de l'observatoire du mont d'arbois par bon Seeing à nouveau
Discret68 a répondu à un sujet de SimonL dans Astrophotographie
Tu aurais eu bien tord de ne pas nous présenter ton image de Saturne ! Juste pour me coucher moins bête ce soir, surtout que je suis essentiellement CP. Ton MEADE, c'est bien un rapport natif de f/d10, soit 4m de focale ? Et "TV PM 2x" , c'est bien une barlow 2x, une Televue si je décrypte correctement ? Soit une focale de 8m ! C'est bien cela ? -
Jupiter de l'observatoire du mont d'arbois par bon Seeing à nouveau
Discret68 a répondu à un sujet de SimonL dans Astrophotographie
Superbe série malgré les mauvaises conditions. Il faut savoir être patient et opportuniste pour profiter d'un trou entre les nuages 👍 Il y a une raison pour laquelle ta dernière image est tournée de 180° par rapport à ta série ou c'est juste une petite erreur ? -
Je suis du même avis que Seb. Quel modèle de correcteur as-tu ? C'est bien un correcteur pour SCT ? Peut-être que tu ne prends pas la cote du BF au bon endroit. C'est assez facile de se tromper. De plus, la valeur théorique du BF n'est pas une parole d'évangile, La valeur réelle peut être légèrement différente de celle annoncée. le seul juge de paix, c'est la forme des étoiles dans les angles.
-
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
En voila une solution qu'elle peut être bonne à mettre en œuvre pour s'affranchir du problème 👍 Je vais tester ! Mais bon, faut pas être pressé d'avoir une validation de l'efficacité, d'autant que si ledit écran ne se présente plus (rare quand même), on ne sait pas si c'est lié au fait que Windows ne le génère pas ou si c'est la formule magique qui l'évite. De toute façon, ce qu'on demande, c'est que le problème disparaisse 😜 -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
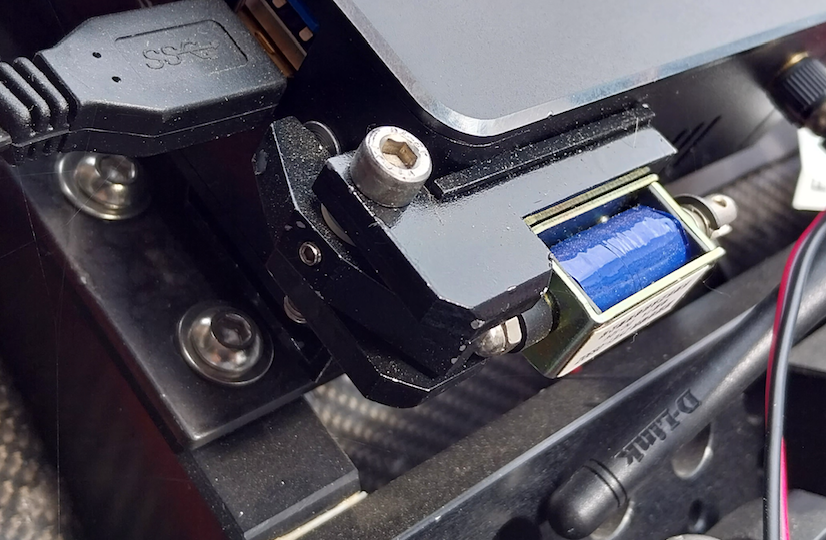
Tu ne crois pas si bien dire ! Sur mon newton, j'ai clampé un mini PC acquisition. Comme ce PC était neuf, je ne voulais pas perdre la garantie (certaines vis du couvercle étaient sous une étiquette pour démontrer une intervention dans le boitier). Pour contourner le problème, j'ai installé un "doigt motorisé" que j'ai usiné dans de l'aluminium et qui appuie sur le bouton de mise en route/arrêt du PC. Il y a des parties en caoutchouc qui permettent d'éviter le marquage du bouton. C'est un électro-aimant, connecté à un relais, qui réalise le mouvement :
-
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Je pensais plus à la méthode qui consiste à simuler l’appui du bouton poussoir de mise sous tension du PC. Sur certains modèles, il y a un connecteur sur la carte mère qui contient (entre autres) 2 contacts de mise en route. Il suffit d’établir le contact à l’aide de 2 contacts (COM et NO) d’un relais commandé à distance. On commande le relais avec une impulsion de 2 à 3s et le PC démarre. Avec le même relais et une impulsion plus longue, entre 6 et 10s, on force la mise à l’arrêt du PC qui est planté alors que le pilotage en remote n’est plus fonctionnel. Si ledit connecteur n’est pas disponible, il faut se brancher en parallèle du bouton poussoir. Mais sur certains modèles, je reconnais que ce n’est aisé. Attention néanmoins à la garantie du PC ! Toujours est-il que cette méthode est infaillible. Un autre point sur lequel je n’ai pas de réponse, est ce qu’il faut faire lorsque le PC en remote présente l’écran au démarrage qui propose de démarrer normalement ou en mode sans échec. C’est généralement le cas après un plantage dur. Et dans ce cas, comme l’accès à distance n’est pas encore possible à ce stade, on est coincé. Et le fait de re-booter soit par appui long du poussoir de mise route, soit par coupure de l’alimentation amène systématiquement au même écran. Quand on a son équipement dans le jardin, on règle rapidement le problème mais lorsqu’on est à grande distance, c’est la cata ! -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Si le GIGN passe par ton abri, tu es menotté en moins de 2 minutes 😱 Si le WOL ne fonctionne pas du tout, ou pas dans 100% des cas (c'est à dire qu'il existe des cas où l'ordi ne se met "malheureusement" pas en route, il est tout à fait possible de démarrer le PC via un relais. C'est normalement infaillible !
-
modele d'étoiles 10Micron GM1000HPS...
Discret68 a répondu à un sujet de smb dans Matériel astrophotographique
A 1 an et 1 jour après ouverture de la discussion, c’est une vraie commémoration 😘 Si si tu installes un réducteur sur ton télescope, tu n’as pas besoin de reprendre ni le MES, ni le modèle de pointage. Au pire, de par son montage, ton réducteur peut induire un petit décalage du centrage de l’image, mais c’est sans importance car l’astrométrie se charge de recentrer si besoin. -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
A titre d'exemple, voici le type de relais que j'utilise en version 4 "inverseurs" : https://fr.rs-online.com/web/p/relais-de-puissance/7761660?gb=s Avec possibilité de le monter sur un support type rail DIN. Ce type de support permet un câblage plus aisé : https://fr.rs-online.com/web/p/supports-relais/1893263?gb=s Le relais en version 2 inverseurs : https://fr.rs-online.com/web/p/relais-de-puissance/5345055?gb=b Et le support correspondant : https://fr.rs-online.com/web/p/supports-relais/5348868?gb=b C'est de la bonne "camelote", depuis plus de 7 ans, pas un seul problème de fonctionnement ! -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Fait attention, c'est la période de la chasse à la buse en ce moment Tous les relais utilisés dans ce schéma ont 2 ou 3 jeux de contacts. Dans chaque jeu de contact, il y a 1 COM (commun), 1 contact NO (normalement ouvert. c'est à dire que le contact n'est pas passant avec le contact COM lorsque le relais n'est pas alimenté. Le contact s'effectue lors de la mise sous tension du relais) et un contact NF/NC (normalement fermé/Normaly Closed, le contact est passant avec le COM lorsque le relais est hors tension et le contact se coupe lorsque le relais est alimenté). Dit d'une autre façon, le courant passe entre COM et NF lorsque le relais est hors tension et le courant passe entre COM et NO lorsque le relais est sous tension. Les relais peuvent avoir de 1 à plusieurs jeux de contacts qui vont être activés simultanément. -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Ici, ce sont les araignées qui s'en donnent à cœur joie. A chaque fois que je vais dans l'abri, c'est un vrai film d'horreur. Plein de cadavres (d'insectes) au sol et ma tête emballée dans des toiles d'araignées 🤕 -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
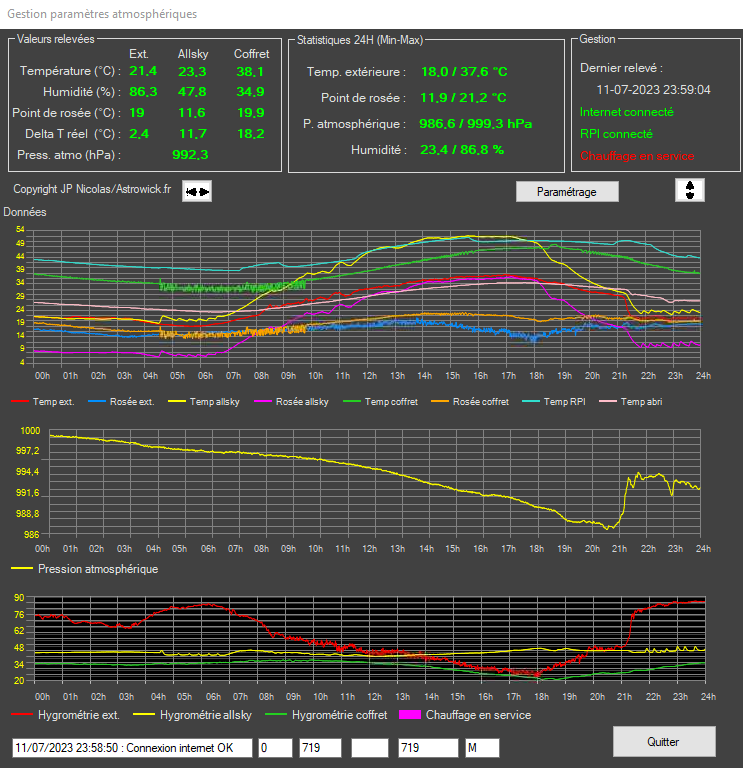
OK, c'est bien suffisant. Il faudra voir en automne lorsqu'il y a une hygrométrie plus importante et une baisse franche de la température en soirée. C'est surtout là que le risque est présent. Mais avec les ouvertures que tu as, à mon sens, aucun risque. Ça fait au moins 6 ans que mon abri est fonctionnel et idem, je n'ai jamais eu de condensation. Pour info, je me suis développé une application qui permet de suivre tous les paramètres ambiants (pression atmo, hygrométrie, point de rosée, ..) dans l'abri, la allsky, le coffret électrique. Le 11 juillet, avec une température qui est montée à 37,6° à l'ombre (exceptionnel), la température intérieure de l'abri est montée aux alentours de 34° 😱 Le boitier qui contient le Raspberry Pi est monté à un peu plus de 50° en interne ! Par contre, avec l'ouverture en partie basse sur toute la périphérie, tu ne crains pas les rongeurs ? Certains adorent les câbles électriques ou les pièces en caoutchouc.
-
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Tu es proche du bout ! Ça ne se voit pas sur ta photo, mais as-tu des ouïes de ventilation en partie supérieure ? Le bas est bien ventilé, mais la chaleur s'accumulant en partie haute, il est bon d'avoir des ouvertures pour permettre la circulation. -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
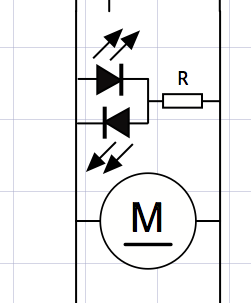
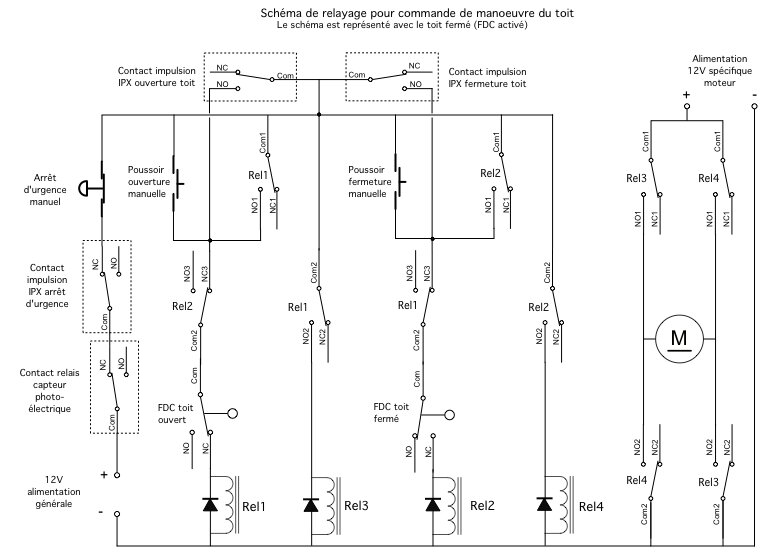
Merci, mais il n'y a pas beaucoup d’intelligence dans ce système, juste du bons sens. Et surtout l'envie de faire simple et fonctionnel. La mise en couleur permet effectivement de mieux comprendre le regroupement des différents contacts des relais ... et des bobines de commande. Tout à fait, comme indiqué sous le titre du schéma, le toit est fermé et le FDC fermeture est de fait activé. Mais à ce stade, tous les relais se retrouvent hors tension. Dans une exploitation en "pure électromécanique" (relais, contacteurs, ...), ces diodes ne sont pas indispensables. Elles sont surtout nécessaires lorsqu'on a de l'électronique qui est en interface aux relais. Les composants électroniques actifs (transistors, circuits intégrés, ...) n'apprécient guère les retours de tension ou les inversions de tension. Chez moi, je ne les ai pas monté ! Petit complément : vu que je suis en remote, j'ai ajouté 2 diodes montées tête-bêche sur l'alimentation du moteur de manière à contrôler la présence effective de la tension sur le moteur. Cela fait suite à 2 problèmes que j'ai rencontré durant les années de fonctionnement, mais qui n'ont pas de lien direct avec la logique de commande. Dans les deux cas, le toit n'a pas manœuvré. Avec les leds, je vois tout de suite avec la caméra de surveillance si le moteur est sous tension ou pas. Cela permet un début de caractérisation d'un éventuel dysfonctionnement du système. Un jour, le toit ne s'est pas fermé automatiquement en fin de séquence au petit matin. j'ai lancé la commande à distance et aucune manœuvre ! En allant voir dans l'abri, j'ai pu constater un dépôt de rosée sur le réflecteur du capteur de position park. Le rayon lumineux n'était de fait pas renvoyé par le réflecteur, et le système voyait la monture non en position park, donc, pas de fermeture du toit. J'ai confectionné une petite résistance chauffante avec des résistances basiques collées derrière le réflecteur pour éviter le dépôt potentiel de rosée. C'est le système qui gère les résistances de désembuage des différents setup en fonction des conditions atmosphériques qui gèrent la mise en service de la petite résistance chauffante, dont la puissance est de l'ordre de 2 ou 3W. Dans un autre cas, le toit (dont la structure est en bois) s'était légèrement déformé avec l'humidité. Il était resté accroché au niveau d'un des deux rails. Bilan : toit arrêté à mi-course. Et comme le fin de course fermeture ne s'activait pas, le moteur est resté sous tension pendant un bon moment. Le câble inox à frotté sur la poulie alu du moteur maintenu en rotation. Au petit matin, il y avait un petit tas de limaille d'alu sous le moteur 😱 J'ai rehaussé le toit de quelques mm à l'aide du système de réglage des roulettes, et c'est reparti. Il est vrai que dans ce cas de figure très spécifique, les leds ne sont pas forcément d'une grande aide.
-
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
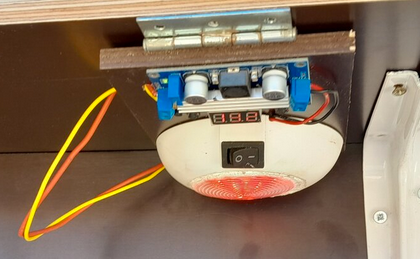
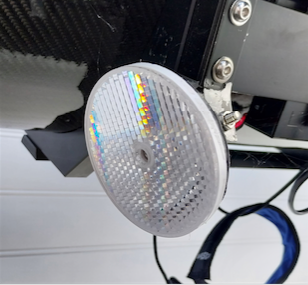
Tout à fait 😉 Pour compléter ce que je disais un peu plus haut, une photo du capteur à réflecteur, et le réflecteur qui est fixé sur le newton : Ce genre de système est très directionnel (quelques degrés de tolérance). Il n' y a pas de risque de valider la position park dans une position qui n'est pas pile-poil la position attendue. Et la petite commande qui me permet de réaliser les manœuvres en local : Le poussoir d'arrêt d'urgence tel qu'indiqué sur le schéma a été remplacé par un interrupteur, ce qui me permet de d'interdire temporairement les manœuvres.
-
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Si c'est à ce schéma que tu fais allusion, le voici : Rapide description : Il y a 4 relais : REL1 et REL2 servent à la commande, REL3 et REL4 servent à alimenter le moteur avec inversion de sens. La manœuvre du toit peut s'effectuer de 2 manières : par des boutons poussoirs pour une action en local (ouverture, fermeture et arrêt d'urgence), ou par des contacts relais pour une commande à distance. Sur le schéma, il existe 3 commandes à distance nommés "contact impulsion IPX" car j'utilisais un IPX800 dans l'abri, mais n'importe quel relais convient. On retrouve les mêmes actions qu'en local (ouverture, fermeture et arrêt d'urgence). Le contact du détecteur à réflecteur entre dans le circuit de commande et permet ou non la manœuvre du toit. Il y a 2 fins de course pour borner les déplacements du toit. L'avantage du système : c'est rustique, facile à câbler, pas de programme, pas de risque de plantage et moins sujet aux pannes que les composants électroniques. Ça fait depuis 2016 que ça fonctionne sans broncher. Entre temps, j'ai ajouté un fin de course supplémentaire avec un inverseur qui me permet de choisir une ouverture complète du toit ou un dégagement complémentaire du toit pour dégager le secteur où le oit s place en ouverture. J'ai utilisé des relais à support qui se montent sur un rail DIN. Si le câblage est réalisé consciencieusement, ça fonctionne du premier coup. Vu que la commande s'effectue par des relais (IPX ou carte relais sur Arduino ou autre), il est tout à fait possible de piloter l'ensemble via un driver ASCOM, ou par des scripts VBS. JP