Discret68
-
Compteur de contenus
2250 -
Inscription
-
Dernière visite
-
Jours gagnés
2
Tout ce qui a été posté par Discret68
-

Reportage sur un changement radical (histoire longue)
Discret68 a répondu à un sujet de djalex1664 dans Astrophotographie
Justement non, c'est de chez eux que vient la courroie caoutchouc que je trouve relativement rigide 😒 Mais bon, il faut que je termine l'usinage des pièces pour voir, une fois montée, comment est la tension sur la courroie. -
Si pour de l’astrophoto, je trouve cette démarche pertinente, je suis très nuancé pour du visuel. J’imagine que ça doit faire bizarre d’avoir l’image à l’oeil qui se défocalise à chaque fois qu’on fait la MAP. Ça doit faire un peu comme l’autofocus d’un APN, sauf que sur un focuser, c’est à chaque fois qu’on appuie sur un des 2 boutons de MAP et ce à une vitesse bien moindre qu’un autofocus. L’avantage avec un Arduino, c’est qu’on peut changer facilement le code en fonction de ce qu’on veut. A réfléchir !
-
Choix capteur N&B pour un RC300 (longue focale)
Discret68 a répondu à un sujet de FloEd dans Matériel astrophotographique
Certes, la 2600MM est un bon compromis. Néanmoins, avec un capteur ayant une diagonale de 28mm et avec des filtres de 1 pouce, soit un diamètre de passage de 26mm, y compris la distance entre les filtres et le capteur, il va y avoir un vignettage (mécanique) dans les coins. Les flats vont permettre de récupérer ce problème mais avec une perte du RSB dans les angles. Ce n’est pas insurmontable mais en être conscient avant l’achat, c’est mieux et ça évite la surprise. Même avec un KAF8300, les filtres 1 pouce, je trouve que c’est un peu juste. Sur la mienne, j’ai monté des filtres de 36mm de diamètre pour être tranquille. -
Je ne comprends pas pourquoi « tourner un bouton de 1° » alors qu’il faut appuyer sur un bouton pendant un laps de temps. Avec mon système, sache qu’il est possible de descendre à une vitesse de rotation telle que tu ne verrais même pas le moteur qui tourne. L’intérêt du système est que tu peux avoir aussi bien 300 impulsions par seconde (donc 300 pas moteur par seconde) comme avoir 1 impulsion toutes les 10 secondes (donc 1 pas toutes les 10 secondes). Et comme il y a 2 vitesses réglables, il est possible de remplacer une des 2 ajustables par un potentiomètre pour avoir une vitesse fixe et une vitesse variable. Il est aussi possible de remplacer l’interrupteur par un commutateur à plusieurs positions, il est ainsi possible de programmer tout une gamme de vitesses.
-
Reportage sur un changement radical (histoire longue)
Discret68 a répondu à un sujet de djalex1664 dans Astrophotographie
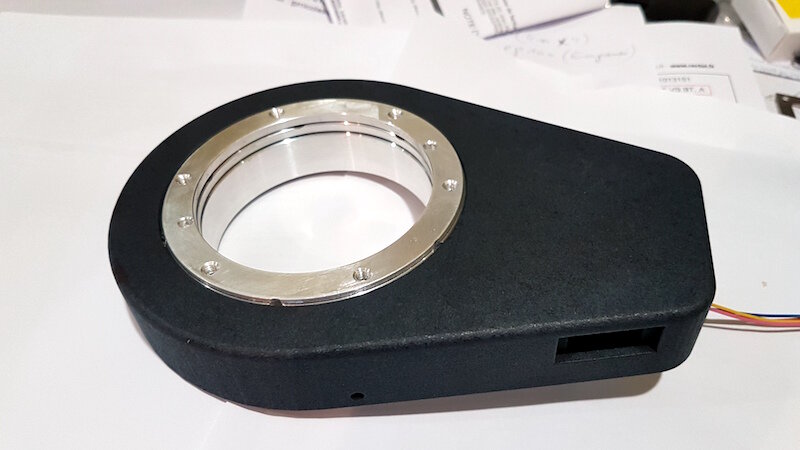
J'avais bien compris que tu étais dans du prototype 😎 En fait, suite à la première fabrication d'un rotateur en 3" (presque terminé et destiné à mon newton de 300) avec un système à poulies crantées dont j'ai pu valider la viabilité mécanique du concept, j'ai engagé la fabrication d'une version 2" plus légère pour ma lulu de 80. Dans la version 3", j'ai opté pour un montage à 2 roulements à billes. Compte-tenu des dimensions des roulements, j'ai trouvé une poulie principale au bon diamètre au pas de 2,5mm, que j'ai pu ré-usiner. la courroie en caoutchouc est très souple. La tension de la courroie s'en retrouve très modérée. Pour la version 2", pour des raisons d'encombrement et de montage avec un roulement spécifique (double rangée de rouleaux croisés, plus compact que 2 roulements à billes), j'ai été "contraint" de passer sur un pas de 5mm (profil 5M) pour trouver une poulie au bon diamètre. A la réception du matériel, je me suis rendu compte que la courroie est relativement rigide. Je vais voir ce que ça donne au niveau de la tension de la courroie, mais vu la raideur, il va falloir tirer davantage ! J'ai regardé pour une courroie en polyuréthane, qui me semble plus souple, mais impossible à trouver avec un profil 5M. C'est pour cette raison que je posais la question sur la souplesse et la viabilité dans le temps d'une courroie imprimée 3D, pour voir si ça peut être une solution au cas où. Pour le partage d'idées, voici une photo de la version 3" sur une plaque de montage en alu qui représente la base du corps pour valider le concept : Et avec le capot en impression 3D (Sculpteo) :
-
Reportage sur un changement radical (histoire longue)
Discret68 a répondu à un sujet de djalex1664 dans Astrophotographie
Hormis pour la validation d'un prototype, je me pose des questions sur la durée de vie des courroies imprimées en TPU. Vu qu'il n'y a pas de renfort métallique à l'intérieur de la courroie, cette dernière n'a t'elle pas tendance à se détendre (plus ou moins rapidement) dans le temps ? N'ayant jamais eu de courroie de ce type dans les mains, je ne sais pas comment est l'élasticité du matériau ! Est-ce plutôt rigide ou plutôt tendance caoutchouc ? -
Mais est-ce le vrai besoin ou une solution parmi d'autres potentielles à un problème rencontré ? Seul @norma peut nous répondre 😉 Fréquemment, dans l'énoncé d'un problème qu'on rencontre, on cherche comment mettre en œuvre une solution qu'on a imaginé, au lieu d'exprimer le vrai problème de fond. De fait, cette approche bride d'autres solutions qui pourraient s'avérer plus efficaces.
-
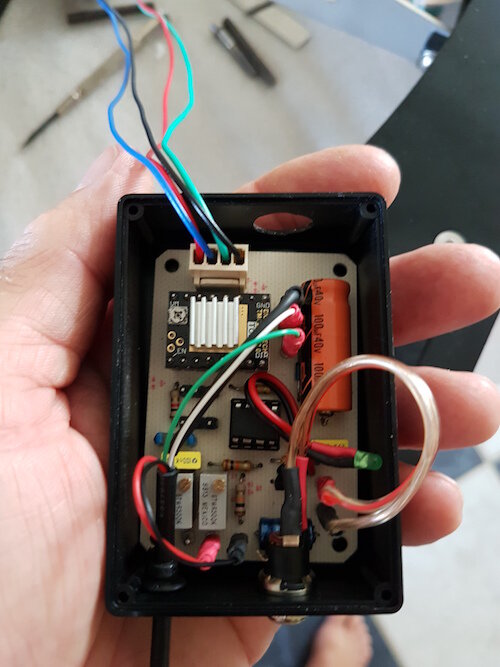
Il me semble ne pas avoir vraiment compris le fond de la question. Tu veux pouvoir manœuvrer un focuser via une raquette (boite à boutons) ou via un ordinateur (driver Ascom ou logiciel spécifique) ? le premier cas, c'est préférentiellement pour faire la MAP en visuel. le 2ème cas, c'est pour de l'astrophoto ! Si c'est pour faire une commande manuelle, il y a plus simple que d'utiliser un Arduino. J'ai fait une motorisation pour un focuser à l'aide d'un NE555 (générateur d'impulsion - 8 pattes au lieu de 30 !) qui alimente un driver de moteur pas à pas DRV8825 ou mieux, un TMC2208 qui amène un fonctionnement beaucoup plus silencieux du moteur) et .... un moteur pas à pas Nema14 (un plus gros moteur est possible. Il y a 2 boutons pour le sens de manœuvre et 1 inter qui permet de changer de vitesse. 2 ajustables permettent d'ajuster 2 vitesses au choix (rapide/lente). Il est bien sûr possible de remplacer une des ajustable par un potentiomètre pour pouvoir faire varier la vitesse à l'aide d'un bouton. pattes au lieu de 30 !) le schéma est beaucoup plus simple et de taille plus réduite qu'en partant avec un Arduino :
-
Avec un filtre SII, tu ne vas faire « travailler » ton capteur que sur le pixel rouge de la matrice de bayer, soit 25% d’utilisation. Si tu prends un filtre IDAS NB3, tu as le SII sur le rouge et l’OIII sur les pixels verts et bleu. Avec PI, tu fais une extraction RVB pour récupérer les différentes couches et tu remixe le tout avec les couches extraites du L-Extrem.
-
Choix capteur N&B pour un RC300 (longue focale)
Discret68 a répondu à un sujet de FloEd dans Matériel astrophotographique
Vu ta signature, j’en déduis que tu possèdes déjà ton RC de 300. Donc remplacer ton tube pour trouver une caméra ad’hoc n’est probablement la voie dans laquelle tu souhaite t’engager. Tu parles également de filtres. Quel est le diamètre de tes filtres actuels ? Car cela va conditionner directement la taille du capteur. Compte-tenu de ta focale, tu a un setup dédié « objets de petite taille ». Si si tu as des filtres en 2 pouces, une ASI6200MM avec laquelle tu peux changer de mode bin à souhait pour l’adapter à ta focale. De plus, ce capteur permet de disposer d’un champ important. Et en plus, elle rentre dans ton budget. Mais, je le répète, il faut des filtres 2 pouces mini, sinon gros vignettage mécanique assuré. -
Oui car le SII est pratiquement à la même longueur d'onde que le Ha. Il faut juste penser à renommer les fichier Ha et OIII d'origine pour éviter qu'ils soient remplacés par les nouveaux.
-
Belle image. On a vraiment l'impression d'un certain relief. LEs nuages de poussière sont bien mis en évidence. Tu prévoies d'ajouter une couche SII ! Cela sous-entend t'il que tu as fait un traitement HOO car tu ne le précises pas ?
-
Se fabriquer une camera AllSky pour moins de 100 Euros c'est possible ;-)
Discret68 a répondu à un sujet de Astroghost-Francois dans Les bricoleurs
Tu as également le modèle de chez Starlight : https://www.teleskop-express.de/shop/product_info.php/info/p15652_Starlight-Xpress-Oculus-PRO-180---All-Sky-Camera-with-180--Lens.html Il est clair qu’une « vraie » allsky est un produit coûteux car le marché est très réduit. C’est sans commune mesure avec ce qu’on peut construire soit même. Il existe des caméras de surveillance pas chères à champ large mais dont la sensibilité est faible. Peu d’étoiles sont visibles, contrairement aux allsky utilisant une caméra astro. -
Il faudrait peut-être que tu poses ta question sur le forum Nina qui est sur Discord.
-
là je sèche !
-
Dans ce cas, essaies en branchant l'USB du FocusCube sur le hub USB de la 1600. Peut-être que tu es dans le même cas de figure que j'avais avec ma RAF. L'informatique n'est pas une science exacte, alors .....
-
J'ai également un FocusCube V2 sur ma FS60 et je n'ai jamais de problème de connexion. Après mise sous tension du focuser, il faut attendre une dizaine de secondes pour que l'initialisation se fasse. J'ai réussi à reproduire ton message d'erreur lorsque le FocusCube n'est pas alimenté. Je ne me rappelle pas si tu as précisé ce que tu as comme caméra. J'ai eu un problème similaire avec une roue à filtres de chez Starlight avec laquelle je n'arrivais pas à me connecter au premier coup. Il fallait débrancher le connecteur USB de la roue puis le rebrancher pour que la RAF soit reconnue par Nina. Cette RAF était connectée en direct sur l'ordinateur astro. Un astram m'a donné une astuce pour supprimer le problème. Connecter la RAF sur le petit hub USB de la caméra. C'est pour cette raison que je te demande ce que tu utilises comme caméra. Depuis que j'ai raccordé la RAF sur la caméra, plus aucun soucis de connexion avec Nina.
-
Caméra planètaire !... oui, mais laquelle ?..
Discret68 a répondu à un sujet de pyrou61 dans Matériel astrophotographique
Je crois que je vais arrêter ma contribution à cette discussion car, soit tu ne lis pas ce qu'on explique ou alors, tu ne comprends pas ce qu'on écrit !!! Je perds vraiment mon temps ici ! -
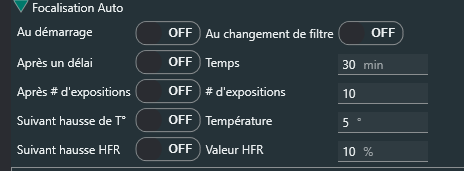
Il faut faire la différence entre "refaire une MAP auto en fonction de la variation de température" qui est un des critères de reprise de la MAP et la "Compensation de température" qui est un autre critère. Dans le premier cas, une reprise auto de la MAP sera effectuée lorsque la température ambiante varie d'une valeur que tu as spécifiée dans le séquenceur ("Suivant hausse de T°") : Perso, je n'utilise pas ce critère car on ne sait pas vraiment à quoi on peut s'attendre comme impact sur l'image lors d'une variation de température. Selon la constitution de ton équipement, l'impact peut être différent. Un tube en alu se dilate d'une valeur beaucoup plus importante qu'un tube carbone et ce pour une même variation de température. Dans mon cas, j'utilise la variation de HFR comme étant le critère de reprise de la MAP auto. C'est à mon sens le bon indicateur de dégradation de la focalisation. Je descend entre 5 et 8% de variation. Sachant que j'ai un tube en fibres de carbone (coefficient de dilatation proche de zéro), j'ai 1 ou 2 reprises dans la nuit, car d'autres éléments sur le train optique se dilatent. Avec la FS60 qui a un tube en alu mais beaucoup plus court, c'est du même tonneau, 1 à 2 reprises par nuit). Attention néanmoins à ne pas descendre trop bas car en cas de turbulence, on peut assister à des reprises de MAP incessantes. Dans le 2ème cas (Compensation de température). On intervient directement au niveau de la correction de la position du focuser en continu et ce, en fonction de la variation de température. En clair, il faut mesurer les valeurs de position du focuser entre 2 valeurs de température extérieure. On en déduit la variation de focus par rapport à la variation de température (liée à la dilatation des équipements), ce qui permet d'obtenir une valeur de variation de position de focuser par degré de température. Exemple, ça sera plus simple à comprendre : dans la nuit, avec des MAP auto, je relève les positions du focuser et la température extérieure correspondante. Avec un focuser à 2350 pas, j'ai une température de 12°. Plus tard dans la nuit, alors que la température a chuté, à l'occasion d'une nouvelle séquence de MAP auto, je relève 9,5° et une position de focuser à 2380 pas. Au final, on obtient une variation de 30 pas (2380-2350) pour une variation de 2,5° (12-9,5), ce qui nous donne une variation de 30/2,5 soit 12 pas focuser par degré. L'intérêt de cette correction, c'est que le focuser va se déplacer (très lentement et ponctuellement) au fil de la variation de température (vu qu'en général, elle évolue plutôt lentement). Quand le système est bien réglé (on a déterminé la bonne valeur de variation !), normalement, il n'y a pas de reprise de MAP. Les déplacements étant infimes, il peuvent se faire pendant les acquisitions. C'est à mon avis un très bon critère pour garantir une hfr stable (hormis la problématique de turbulence) durant une séquence complète. Par contre, je ne sais pas où on saisit la valeur de variation qu'on a déterminé dans Nina ! Sur les autres logiciels que j'utilisais avant Nina, je saisissais ce critère et je n'avais pratiquement aucune reprise de MAP. Bref, vu que tu n'as probablement saisi aucune valeur numérique pour la compensation de température, le bouton sur ON ou OFF ne changera rien.
-
Caméra planètaire !... oui, mais laquelle ?..
Discret68 a répondu à un sujet de pyrou61 dans Matériel astrophotographique
Pour continuer à essayer de te guider, voici une vidéo qui parle de l'échantillonnage et de la taille des photosites de la caméra en fonction du rapport f/d de l'instrument et de l'ajout d'une barlow : A 14mn, tu as directement des tableaux qui permettent de voir la taille préconisée des photosites pour une caméra couleur en fonction du rapport f/d natif du tube (4 dans ton cas) et de la barlow associée (de 2 à 4x). Tu devrais trouver par toi même (je ne vais pas tout te dire !) la taille des photosites de ta future caméra. Une autre vidéo sur le même sujet, mais plus longue : Je pense que tu devrais t'en sortir. -
De mémoire, cette case n’est utile que lorsqu’on fait des acquisitions en déclenchement manuel ou durant une séquence. Ça permet de visualiser l’évolution de la hfr au fil des images. De toute façon, pour une focalisation automatique, il faut implicitement mesurer la hfr des étoiles, donc Nina fait la mesure. Sinon, ça serait un non sens de lancer une MAP auto sans mesurer la hfr ! A contrario, je crois au fait que tu sois passé de 300 pas à 20 pas entre 2 points de mesure, ce qui permet à Nina de mesurer effectivement la hfr. Ça fait quand même une sacré différence entre la valeur initiale et l’actuelle. Pas étonnant que tu aies eu des étoiles en forme de donut. Au vu de ta courbe, malgré l’absence d’affichage des valeurs numériques extrêmes, je pense que tu pourrais augmenter un peu la valeur entre pas, 25 voire 30. À tester. Je vois sur ta copie écran que tu as la case « Compensation température » qui est sur ON. Tu as déterminé la valeur de correction ? Sinon, mets ce critère sur OFF.
-
Caméra planètaire !... oui, mais laquelle ?..
Discret68 a répondu à un sujet de pyrou61 dans Matériel astrophotographique
Normalement, le document est à télé charger en une seule fois. A moins qu'un changement ai été effectué 🤔 Tu aurais un lien pour voir les discussions en question ? -
Caméra planètaire !... oui, mais laquelle ?..
Discret68 a répondu à un sujet de pyrou61 dans Matériel astrophotographique
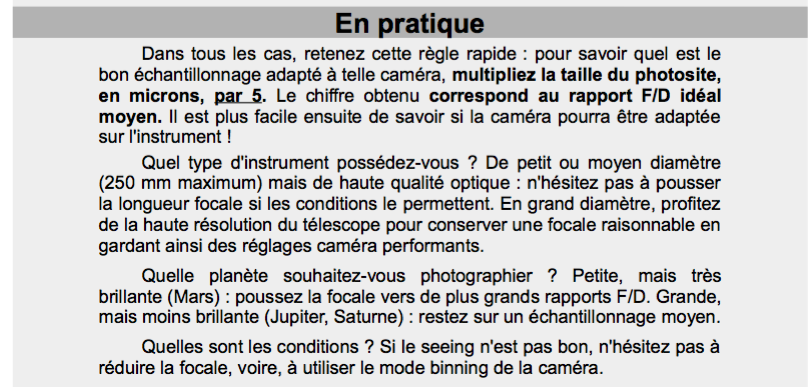
Dans le guide que tu peux télécharger sur le site de Christophe Pellier (si, si, j'insiste), au paragraphe 7 page 16 sur 23, tu vas trouver ceci : A partir de là, tu as toutes les clés pour déterminer ton setup planétaire (photosites caméra, rapport f/d du tube, coeff barlow) , quel que soit le bout du tuyau par lequel tu rentres. C'est par rapport à ce petit calcul et à l'équipement dont tu disposes actuellement que je te proposais plutôt de t'orienter vers une caméra ayant des photosites de 2,9 microns.
-
Caméra planètaire !... oui, mais laquelle ?..
Discret68 a répondu à un sujet de pyrou61 dans Matériel astrophotographique
Dans mon message du10 octobre, j'écrivais : En t’inscrivant sur cette page https://www.planetary-astronomy-and-imaging.com/reussir-images-planetaires/ , tu pourras télécharger le guide « Réussir ses images planétaires » . Il y a notamment un paragraphe concernant le choix de l’échantillonnage et de la caméra en fonction du setup utilisé. Est-ce que l’as fait ??? -
Caméra planètaire !... oui, mais laquelle ?..
Discret68 a répondu à un sujet de pyrou61 dans Matériel astrophotographique
As-lu les préconisations de Christophe Pellier ? Les gros pixels, c'est pour du ciel profond !