Discret68
-
Compteur de contenus
2250 -
Inscription
-
Dernière visite
-
Jours gagnés
2
Tout ce qui a été posté par Discret68
-
Merci de nous prévenir, j'ai réactivé l'antivirus sur mon ordi, des fois que tes messages soient contaminés 😃 Perso, je pense que c'est suffisant. Entre 1/2 et 3/4, ça va le faire ! On peut penser que ton miroir secondaire n'est pas correctement centré par rapport au PO. Il y a en fait 2 centres à prendre en compte au niveau du miroir secondaire. Le centre géométrique, qui correspond au centre mesuré du grand axe et du petit axe du miroir et il y a le centre optique, qui est décalé par rapport au centre géométrique d'une cote qui dépend du rapport f/d du télescope : http://serge.bertorello.free.fr/calculs/posplan.html Dans ton cas, il doit être de 5mm. Si le secondaire n'est pas optiquement correctement centré, tu peux avoir un décalage de la plage de luminosité des flats .... et des brutes ! Un défaut de collimation ou une présence de tilt peuvent également générer un défaut de centrage de la plage de lumière. Ce qui me gêne plus sur l'image de l'analyse CCDi, c'est la forme du vignettage sur les bords longs du capteur. La courbe de luminosité est complètement perturbée et perd sa concentricité. Je ne vois pas d'où cela peut provenir, d'autant que tu n'as pas de filtre. Ça pourrait être le cas avec un filtre "clippé" dans le boitier de l'APN, mais tu n'as pas de filtre ! Et on retrouve bien cet assombrissement sur tes brutes. Vu que cette zone est bien parallèle au bord du capteur, je pense que c'est au niveau du boitier qu'il faut chercher le coupable. Par acquis de conscience, tu pourrais tourner ton APN d'un angle quelconque (sauf 180° !) pour voir si ce défaut évolue. Mais vu "l'excellence" du parallélisme actuel, ça serait vraiment étonnant que ça bouge. Sur la photo de ton tube (un peu petite pour voir précisément le montage), je vois quelque chose de cylindrique juste en dessous de l'APN. Qu'est ce ? Pourrais tu mettre une photo du train optique (du PO à l'APN) assez grande de manière à bien voir le montage ? En tout cas, ton image de M31 a quand même gagné en qualité 👍

-
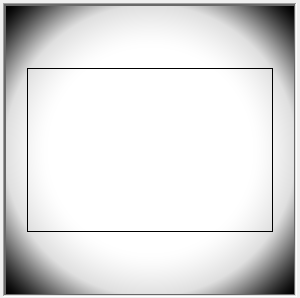
Pour compléter le choix plus adapté d'un capteur de plus petit format (APS-C pour une 2600), voici une comparaison du vignettage entre capteur FF et APS-C derrière un correcteur 2" : Pour le capteur FF, la perte de luminosité est de 68% dans les angles, valeur très proche de celle qu'on mesure sur tes flats réels. Par contre, pour le capteur APS-C, la perte tombe à 18%. Valeur beaucoup plus facile à corriger. Le cercle pleine lumière (dans une configuration correcteur 2") est de 22mm (2 x fois l'offset - la distance par rapport au centre du capteur). Mais avec la taille du capteur FF, la pente est longue et rude ! Soit dit en passant, cet exemple n'a pas pour but de te faire acheter un autre capteur, mais juste pour te montrer à quel point, un capteur FF n'est pas évident à gérer sur un newton avec correcteur 2". Comme joker0247, j'avais monté l'A7S, mais sur mon newton avec correcteur 2", c'était pareil qu'avec l'ASI2400 d'aujourd'hui, un bon 50% de perte dans les angles. Pour cette raison, j'ai passé toute la partie train optique en 3", ça va beaucoup mieux. Mais dans ton cas, ce n'est surement pas la bonne solution car cela te couterait beaucoup plus cher que le télescope lui-même.
-
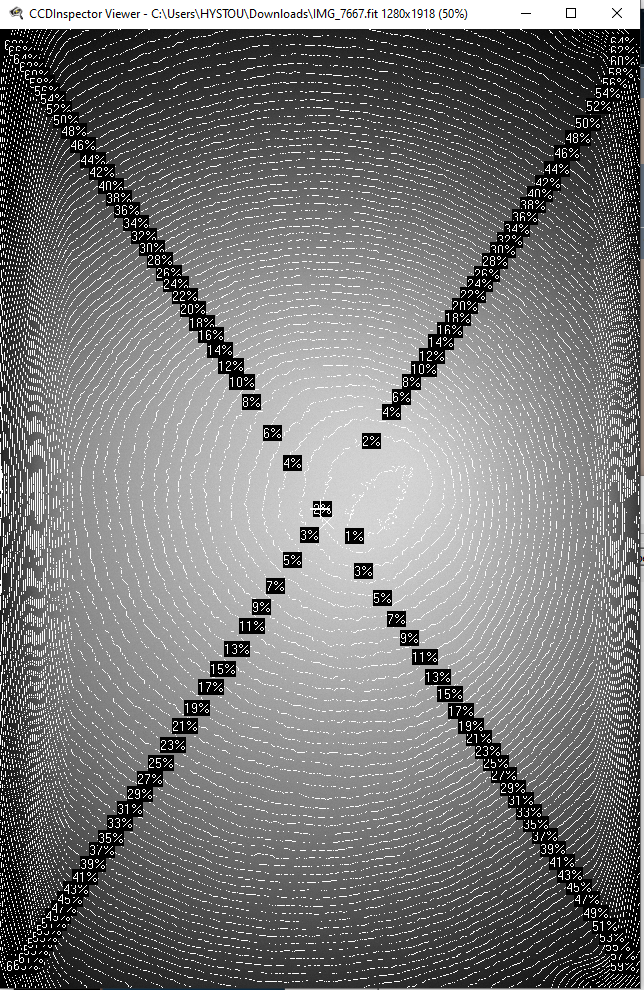
J'ai fait une petite analyse de tes flats. Comme ont constaté les copains, tes flats sont sous exposés. Avec PI, je trouve une moyenne à environ 11000 ADU alors que tu devrais être dans les 40-45000 ADU. J'ai également passé un de tes flats à l moulinette CCD Inspector pour visualiser le vignettage : Tu montes à un bon 60% de perte de lumière dans les 4 angles 😫 En regardant tes flats en taille "normale", je les trouve très propres. Contrairement à certains qui rangent leur APN dans le sac de leur aspirateur, je n'ai pas mis en évidence de poussière sur tes flats, ce qui est une très bonne chose. Sachant que les flats ont pour objectif de prendre en compte le vignettage et la présence de poussières (c'est pour cette dernière raison qu'on dit qu'il faut faire les flats en fin de séance, avant démontage), mais dans ton cas, vu l'absence de poussière, tu peux tranquillement remonter ton APN sur le télescope et refaire une série de flats aux bonnes valeurs d'ADU. Dans tous les cas, je pense que refaire les flats ne peut qu'aller dans le bon sens.
-
Tu n’es certes pas le seul à monter un capteur FF sans en appréhender à priori les problèmes induits. Il y a déjà eu malgré tout des discussions sur cette problématique mais effectivement pas identifiée comme étant la cause d’un problème rencontré. Déjà, tu as un choix, mais passer en 3 pouces nécessite de changer beaucoup de pièces sur ton télescope ; miroir secondaire, porte-oculaire, correcteur. Il est plus pertinent de cropper partiellement tes images. Une autre solution à réfléchir, c’est de prendre une caméra astro avec un capteur de taille adaptée. Une ASI2600MC ou 533MC. Le refroidisseur intégré te facilitera également la gestion des darks et bias.
-
Il se peut que je trompe, mais il me semble que contrairement aux darks et aux bias, la valeur iso peut être différente pour les flats. L’objectif étant de déterminer une « courbe » de variation de luminosité pour corriger les images, vu le niveau ADU attendu des flats, le bruit au niveau du signal du capteur est négligeable.
-
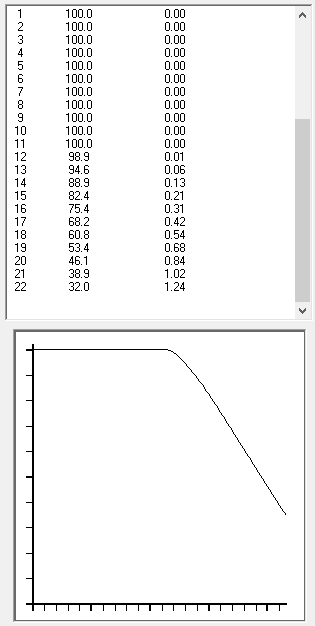
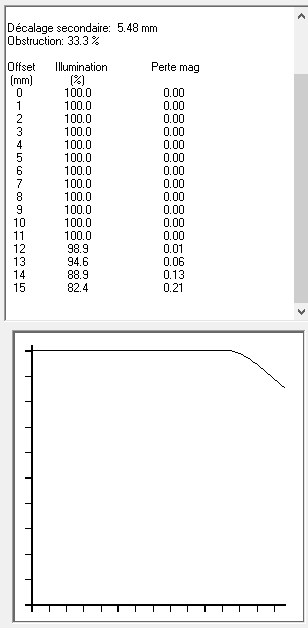
A titre de comparaison, à l'aide du logiciel Vignettage, voila l'impact d'un correcteur 3" sur mon newton de 300 f/d4 avec un capteur plein format (ASI2400MC). La perte de luminosité calculée est de 18% dans les angles : J'ai vérifié mes flats à l'aide de CCD Inspector, le vignettage mesuré est encore plus important 🤔 Toujours avec vignettage, en mettant un correcteur 2", la perte de luminosité atteint 50% dans les angles : C'est juste pour montrer que capteur FF et correcteur 2" ne font pas forcément très bon ménage 🤕 Mais au fond, rien n'empêche de faire des images avec.
-

ZWO ASI533MC & MM non refroidies?
Discret68 a répondu à un sujet de Quarz19 dans Matériel astrophotographique
Pour info, j’ai commandé une Neptune-C II directement chez Player One le 21, elle arrivée ce matin, soit 5 jours de délais. Pas de soucis ! -
Néb diff Mosaïque NGC 7000 et IC 5070
Discret68 a répondu à un sujet de stéphen62 dans Astrophotographie
Belle image 👍 Je pense que tu as dû opérer une bonne réduction d’étoiles car c’est une région qui fourmille d’étoiles. -
Avec ton capteur plein format sur un télescope dont le PO et en 2 pouces, le vignettage est très important dans les angles, de l’ordre de 50%. Le vignettage est la fois optique et mécanique. Le diamètre intérieur du PO est trop faible pour ton capteur. Tu auras beaucoup de mal à compenser ce vignettage sans perdre en qualité. Pour un capteur plein format, il faut passer en 3pouces, mais ce n’est pas le sujet du jour. Pour visualiser le vignettage auquel tu es confronté, je t’invite à tester le logiciel « Vignettage » de Marc Durey : http://www.astrosurf.com/durey/vignettage.html Ce logiciel permet de visualiser le vignettage optique ainsi que le vignettage mécanique. Tu peux modifier certaines dimensions pour bien voir l’impact. Concernant DSS , c’est un logiciel qui n’a pas évolué depuis un certain temps. Si tu veux un logiciel plus performant et gratuit, essaies Siril : https://siril.org/fr/ Ca ne résoudra pas tous tes problèmes, mais tu devrais constater une amélioration dans ton traitement. Autre solution pour la problématique de vignettage, réduire (cropper) l’image en largeur pour supprimer les bords. Tu n’as pas précisé si tu as un correcteur de coma.
-
Sans le STF, ça marche aussi, mais on ne voit pas grand chose. Dans ton cas, si l'image est surexposée, tu vois le cœur de la galaxie sans le STF.
-
Avec Pix, tu ouvres une image. Tu passes un petit coup de STF pour voir le contenu de l'image. Tu te balades sur l'image avec ta souris tout en maintenant le bouton gauche de la souris appuyé. Un zoom de la zone apparait avec les valeurs de luminosité pour les couleurs RVB entre 0 et 1. Si des valeurs sont à 1, c'est que la couleur est saturée. Sur une image monochrome, tu as une valeur K au lieu des RVB, mais le principe est le même. C'est étrange. Tu peux monter la valeur ISO pour remonter la courbe. Tu as également la possibilité d'augmenter le temps de pose. Dans NINA, au niveau de l'assistant PLU, il faut peut-être augmenter la valeur "Exposition max PLU". Si ça marche, profites en également pour faire des darks de flats (baptisés "Noirs de PLU") ! On les utilise à la place des bias (offset). Oui, c'est ce qu'on fait généralement sur des cibles lumineuses (à fort contraste). Poses longues pour les zones faiblement lumineuses (ex : bras de galaxies) et poses courtes pour les zones fortement lumineuses (cœur de galaxie). Quelques objets CP font également l'objet de cette pratique : M42 (nébuleuse d'Orion), M45 (le Pléiades), ...
-
Bon résultat pour une série de premières. Les poussières entre les bras de la galaxie sont bien mis en évidence. Par contre, le cœur est saturé. Cette galaxie étant relativement lumineuse, le temps de pose de 300s est possiblement trop important. As tu mesuré le niveau de luminosité du cœur sur tes brutes ? Par contre, je n’ai pas compris ton problème avec tes flats. Je pense que le message est « vos PLUs » (Plage de Lumière Uniforme) traduction du terme Flat. Il faut que tes flats présentent un niveau moyen situé entre 1/2 et 3/4 de la plage possible. Qu’utilises tu comme source de lumière pour faire tes flats et quel temps de pose ?
-
Bon résultat pour cette nébuleuse. Petite question : pourquoi descendre à 3 chiffres après la virgule pour la proportion des images de base ?
-
En général, lorsqu’un filetage est accolé à un épaulement, on usine une gorge de 1 à 2 mm de largeur et légèrement plus profonde que la hauteur du filetage. Pour un pas de 0,75, une gorge de 0,5 de profondeur est une valeur optimale. Avec un tour « traditionnel », on ne peut généralement pas arrêter la rotation du mandrin au ras de l’épaulement, au risque de taper dans l’épaulement. Avec un tour CNC ou avec une réalisation d’un filetage à la fraise, on peut y arriver. Mais le plus simple est quand même d’usiner une gorge de dégagement de l’outil de filetage, ça garantit aussi le contact entre l’épaulement et le tube sur lequel se visse la pièce. Sur ton schéma, il est préférable de placer la dimension des différent diamètres sur la vue à droite, c’est plus facile à décrypter que sur la vue de devant.
-
Tu ajoutes un peu de l'image (10 à 20%) du JWST dans ton image et tu dis que tu as ajouté une couche Ha, on y verra que du feu. Faudra juste virer les vilaines aigrettes du JWST Sinon, les détails de NGC7331 sont bien mis en évidence.
-
Planète Saturne du 20/09/2022 - Meade 254mm - Asi290mm LRGB
Discret68 a répondu à un sujet de sebseacteam dans Astrophotographie
Ça gigote pas mal ! On dirait que Saturne fait du hula hoop 👍 -
Au niveau des trous de passage des vis, on laisse toujours un jeu. C'est pour cette raison que les trous font 9mm de diamètre pour des vis M8.
-
Planète Mars du 19/09/2022 au 600mm
Discret68 a répondu à un sujet de sebseacteam dans Astrophotographie
OK pour les différentes explications. L'objectif est de faire du planétaire accessoirement avec le newton de 300. Je pense que ça devrait pas mal capter la lumière. Avec un F/d de 4 et une barlow televue 2" de 4X, je dois arriver à un F/d résultant de 16. Si je suis les préconisations de Christophe Pellier, je devrais opter pour une caméra dont la taille des pixels est de l'ordre de 16/5 soit 3,2 microns. Avec la Neptune à 2,9 microns, c'est très bien (il vaut mieux des pixels plus petits), la Saturn étant à 3,76 microns. -
Planète Mars du 19/09/2022 au 600mm
Discret68 a répondu à un sujet de sebseacteam dans Astrophotographie
Mouais ..... j'avoue, moi aussi, je me suis fait avoir ! D'autant que 600mm .... de diamètre, ça devient un peu un nouveau standard dans notre petit monde de l'astronomie amateur. Donc, c'est facile de se faire piéger 😜 J'avoue que je m'attendais pas à un résultat aussi probant avec une lunette de 80 👍 En regardant un peu la palanquée d'informations que tu présentes, il y en quelques unes qui m'interpellent. Mais peut-être que je fais des erreurs d'interprétation, ou que je ne sais plus calculer : Ta lulu étant une 80/600, ça lui fait un rapport f/d de 7,5. Tu as utilisé une barlow x5, ce qui fait un rapport f/d total de 37,5 ! Ce qui nous fait une focale résultante de 3000mm. Hors, dans une ligne, on trouve ceci "FocalLength=3400mm (F/16)" ! A la fois la focale et le rapport f/d ne correspondent pas aux valeurs calculées ! Concernant la vitesse de capture, toujours dans les lignes d'infos, on trouve la durée d'acquisition de 180s (Duration=180.011s), ce qui fait que si tu as engrangé 50000 images, cela fait une cadence de 278 images par seconde. Est-ce vraiment la cadence réelle de cette caméra avec le ROI sélectionné ? D'un autre coté, cela correspond effectivement à la vitesse de prise de vue (Shutter=3.572ms) Sur le site de Player-One, je n'ai pas trouvé d'info pour cette caméra concernant la vitesse de capture en fonction du ROI, alors que pour le modèle Saturn, il y a bien information sur le sujet. C'est un peu pour cette raison que je m'orientais initialement vers la Saturn, bien que la taille des pixels soit un peu moins favorable par rapport à mon setup. En théorie, la Saturn semble être un peu plus rapide que la Neptune. Je pense qu'elle doit être aussi un peu plus sensible compte-tenu de la taille des pixels. D'un autre coté, il faut aussi un ordi capable d'absorber un tel flux. Bon, avec ce résultat sur Mars, tu devrais pouvoir obtenir de bons résultats sur Jupiter. JP -
Backfocus pour 200/800 avec correcteur coma SW GPU
Discret68 a répondu à un sujet de valdetahiti dans Matériel astrophotographique
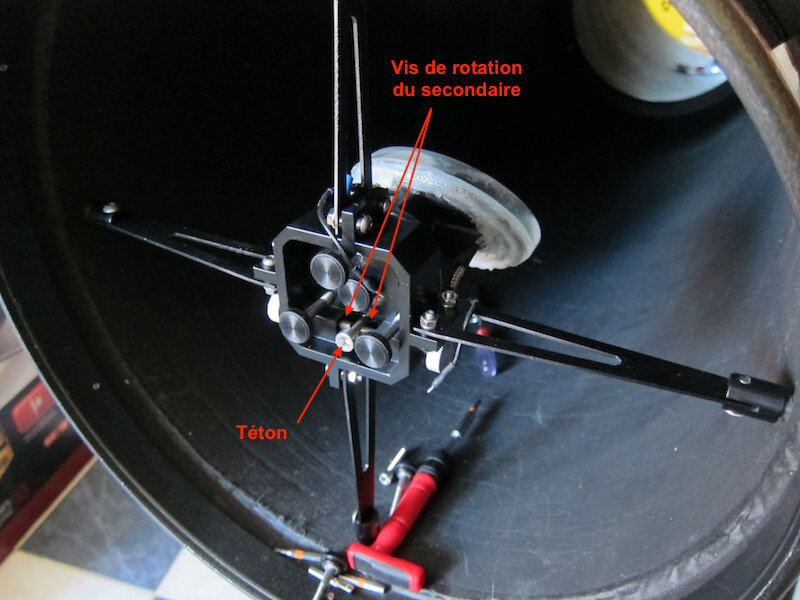
Effectivement, les images ont nettement gagné en qualité par rapport aux précédentes. Il reste un tout petit peu de tilt, mais le risque est de dérégler à vouloir trop bien faire. A ce stade, c'est un peu jouer avec le feu. Si je voulais être un peu tatillon, les branches d'araignée sont bien centrés à l'exception de celle du haut qui parait un peu dédoublée, mais c'est vraiment faible. Il faudra voir à l'occasion d'un empilement pour voir si l'effet s'accentue ou pas. Fais un essai sur des étoiles brillantes (les Pléiades par exemple), c'est très révélateur. En tout cas, tu peux payer une bière à l'ami qui a fait la collimation ! Si la collimation se dégrade, il faudra (re)passer par une phase de réglage, mais uniquement par les 3 vis du secondaire et celles du primaire. La collimation, c'est sur les 2 miroirs. Surtout avec les araignées du commerce, qui manquent de rigidité au niveau de la fixation du secondaire sur la partie fixe de l'araignée. La vis centrale du secondaire servant à positionner l'axe du miroir avec celui du PO, il n'y a pas lieu d'y retoucher. Idem pour les branches de l'araignée, cette dernière est "normalement" suffisamment rigide pour que les branches ne bougent pas. Sauf si tu laisses rouler ton tube sur la pente du Champs du feu jusqu'à Obernai Pour la petite histoire, j'ai usiné une nouvelle partie fixe pour l'araignée de mon newton de 300, "généreusement" dimensionnée par rapport à celle d'origine. Elle est de fait, beaucoup plus rigide. Ses dimensions ont été retenues de manière à ce qu'elle reste masquée par le secondaire. J'ai ajouté 2 vis de réglage du miroir en rotation pour faciliter la collimation. Les branches sont isolées électriquement, ce qui me permet de faire passer la tension d'alimentation de la résistance du secondaire en utilisant 2 branches. Aucun fil ne passe dans le champs. Toutes les vis sont des vis à tête moletée, de manière à pouvoir effectuer les réglage sans outillage, juste avec les doigts. Depuis cette modification, j'ai remplacé les branches que j'avais usiné en aluminium de 2mm d'épaisseur par des branches en acier inox poli de 1mm d'épaisseur découpé au laser.
-
Dans NINA, il est possible de définir une zone restreinte pour la MAP auto. Dans l'onglet option/Focalisation auto, il y a 2 paramètres que tu peux modifier : FA ratio fenêtrage extérieur et FA ratio fenêtrage intérieur. En fonction des valeurs saisies (c'est un ratio, donc nombres décimaux entre 0 et 1), tu peux créer une zone de MAP plus ou moins grande et plus ou moins large qui exclue la zone centrale et la zone extérieure. Par contre, la zone résultante est un rectangle et pas un cercle. Mais ça peut peut-être aider pour solutionner le problème. Fa ratio fenêtrage intérieur permet d'éliminer une zone extérieure et Fa Ratio fenêtrage intérieur permet d'éliminer une zone centrale. Mettre par exemple FA ratio fenêtrage intérieur à 0.7 et FA ratio fenêtrage intérieur à 0.4. Là, je n'ai pas compris ce que tu veux dire !
-
Backfocus pour 200/800 avec correcteur coma SW GPU
Discret68 a répondu à un sujet de valdetahiti dans Matériel astrophotographique
@danielo : Je viens d'effectuer quelques mesures (cotes en mm) sur mon newton : Le primaire fait 300 de diamètre et le secondaire 100 de petit axe. La distance entre primaire et secondaire (axe) est de 855. La distance entre axe secondaire et capteur caméra est de 355. Déjà, je retrouve la distance focale de 1210 déterminée par un logiciel d'astrométrie. En théorie, le miroir fait 1200 de focale et le correcteur TS-Wynne recule le plan focal de 16mm. Le miroir doit avoir une focale légèrement plus réduite que la théorie, mais ça, ce n'est pas réellement une surprise. En prenant la formule de Vic Menard, la distance entre axe secondaire et OCAL doit être de 855/((300/100)-1) soit 427,5mm. Ce qui m'amène à "reculer" le capteur de l'OCAL de 77,5mm (427,5-350) par rapport au capteur de la caméra en place. Le capteur étant à 60mm de la face du PO, il me faut un tube me permettant de placer le capteur de l'OCAL à 137,5mm (60 + 77,5) de distance de la face du PO. 137,5mm, c'est long ! Avec cette longueur, je risque d'engendrer un défaut de coaxialité entre l'axe optique du secondaire dans le PO et l'axe optique de l'OCAL. Je pense qu'il est préférable, dans mon cas, d'utiliser le teletube du CatsEye pour caler le centre optique du secondaire par rapport au PO. Je ferai fi de la vision décalée du secondaire observable via l'OCAL. -
Collimation d'un Newton avec Ocal Pro (ou comment aider un débutant en collimation)
Discret68 a répondu à un sujet de valdetahiti dans Matériel général
Ton araignée n’est pas parfaitement centrée. A mon sens, la première chose à faire avant la collimation est de centrer l’araignée pour éviter tout dédoublement des aigrettes. Ne pas oublier également que la rotation du secondaire sur son axe fait partie de la collimation.. Par ailleurs, je pense que tu pourrais à termes remplacer les 3 vis six pans creux par des vis à tète moletée qui facilitent grandement le réglage. -
Backfocus pour 200/800 avec correcteur coma SW GPU
Discret68 a répondu à un sujet de valdetahiti dans Matériel astrophotographique
@danielo : Merci pour les infos, je vais regarder ce que donne la formule pour voir sa mise en œuvre. L'OCAL peut se placer à n'importe quelle distance du secondaire, il suffit de disposer de bagues allonges. La caméra interne de l'OCAL est équipée d'un objectif avec lequel on peut faire la netteté indépendamment du foyer du télescope. Par ailleurs, aucune dimension relative aux constituants du télescope n'est à saisir dans le logiciel de l'OCAL. -
Le recours à une barlow n’est franchement pas une bonne solution, surtout dans le cas d’un dobson. Avec une focale native de 1200, une barlow 2X va passer la focale à 2400. Cette focale peut convenir uniquement pour du planétaire, mais l’APN ne s’y prête guère. Exit le ciel profond, ça ne peut rien donner de bon. De plus, vu la taille du capteur du 2000d, une barlow 1 pouce va générer un vignettage important qui est certes traitable mais qui va également dégrader le résultat. Il faut donc rester en 2 pouces. Le mieux est que tu fasses une photo de ton porte oculaire de manière à ce qu’on puisse te guider au mieux. Sur le PO d’origine, il y a probablement une bague vissée qui permet d’y mettre les oculaires. Cette bague est généralement démontable, ce qui permet de rapprocher l’APN du tube. Mais comme dit, avec une photo on y verra plus clair. Il faut également que tu nous dises ce que tu souhaiterais photographier avec ton équipement. JP