Discret68
-
Compteur de contenus
2 224 -
Inscription
-
Dernière visite
-
Jours gagnés
2
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par Discret68
-

collimation du primaire par déplacement de la cage du secondaire
Discret68 a répondu à un sujet de Fred13115 dans Les bricoleurs
C'est peut-être le moment d'engager la modification. Surtout si le barillet est en cours de refonte. Et en plus, tu sous-traites le travail ! C'est le moment d'inclure quelques travaux supplémentaires 😀 -
collimation du primaire par déplacement de la cage du secondaire
Discret68 a répondu à un sujet de Fred13115 dans Les bricoleurs
Peux tu mettre une photo du fond inférieur de ton télescope pour voir la physionomie ? -
collimation du primaire par déplacement de la cage du secondaire
Discret68 a répondu à un sujet de Fred13115 dans Les bricoleurs
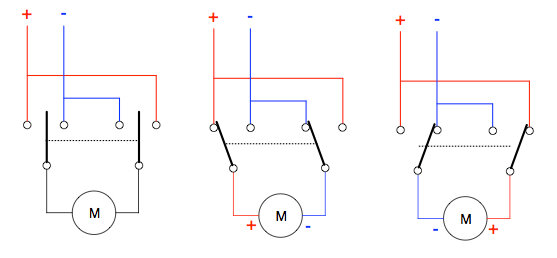
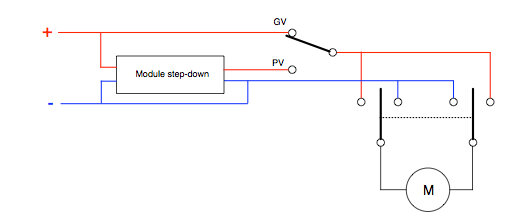
C'est simple, pour piloter 1 moteur à courant continu, il suffit de prendre un inverseur double à 3 positions (seule la position milieu est fixe) . Par exemple : https://www.ebay.fr/itm/223906543084?hash=item3421deb5ec:g:NAIAAOSw3lxeQ-YZ Les 2 positions travail (de part et d'autre de la position repos) permettent d'inverser la tension aux bornes du moteur. Dès qu'on relâche le levier de manœuvre, il revient en position centrale et les contacts sont coupés, le moteur n'est plus alimenté. En terme de raccordement, voila comment ça se passe : Le schéma de gauche représente le câblage de base. les 2 autres schémas montent comment s'effectue l'inversion des polarité sur le moteur. Lorsqu'on veut 2 vitesses de rotation (normale et lente), on peut intercaler un module step-down qui permet d'abaisser la tension d'alimentation afin de créer une réduction de la vitesse de rotation du moteur : Un inverseur (2 positions) fixes permet de choisir une des 2 tensions) : J'ai fait une petite vidéo qui montre ce qu'il est possible de faire avec ce type de motoréducteur avec un step-down sur la motorisation d'un des 2 axes d'une monture Star-Adventurer : Pour 2 moteurs, il suffit de reproduire uniquement le câblage avec l'inverseur double à 3 positions. Le module step-down est commun aux 2 moteurs. Pour le boitier de commande, il suffit d'un petit boitier en plastique dans lequel vient se loger le module step-down, l'inverseur à 2 positions et les 2 inverseurs à 3 positions. Exemple : https://www.ebay.fr/itm/262646277021?hash=item3d26f0239d:g:gL0AAOSwxH1UGBAv la version 50 x 75 x 25 est suffisante. Il faut également un câble à 6 conducteurs (2 pour l'alimentation et 2 pour chaque moteur) entre le boitier de commande et la boite primaire du télescope. Et tu as une raquette pour piloter ta collimation. Même un bout de câble RJ45 de récupération qui contient 8 conducteurs peut faire l'affaire, vu l'intensité qui va passer, la section des conducteurs est suffisante. L'utilisation d'un moteur pas à pas ne se justifie pas dans ce type de montage, sauf si un pilotage par ordinateur est prévu. Néanmoins, on peut faire varier la vitesse de rotation et le sens de rotation en manuel. Il existe de petites platines qui permettent de le faire : https://fr.aliexpress.com/item/1005003354335657.html?spm=a2g0o.productlist.0.0.28a32ebaRDrrmF&algo_pvid=358d14c0-a153-40df-95f2-942551db28b0&aem_p4p_detail=2021101700364710193871369459680015081140&algo_exp_id=358d14c0-a153-40df-95f2-942551db28b0-4&pdp_ext_f={"sku_id"%3A"12000025369337746"} Le prix des moteurs pas à pas et des 2 variateurs reviennent beaucoup plus cher que la version à moteur CC. Et surtout, cette solution ne sert à pas grand chose. Et elle rend plus complexe la mise en œuvre d'une raquette de commande. Coté "mécanique", il faut une platine pour fixer le motoréducteur en fond de la boite du primaire. En utilisant des courroies crantées et des poulies crantées de diamètres différents, il est possible d'obtenir une réduction fixe de la vitesse de rotation. Pour la tension des courroies, nul besoin de galet tendeur. Il suffit que la platine de fixation du motoréducteur soit équipées de lumières plutôt que de trous de fixation et la tension de la courroies peut s'effectuer. Finalement, la solution motorisée peut s'avérer plus simple à mettre en œuvre qu'une solution manuelle (pour laquelle il faut prévoir un système de paliers et de tringles), et avec un confort d'utilisation accru puisque tu dardes l’œil coté PO.
-
collimation du primaire par déplacement de la cage du secondaire
Discret68 a répondu à un sujet de Fred13115 dans Les bricoleurs
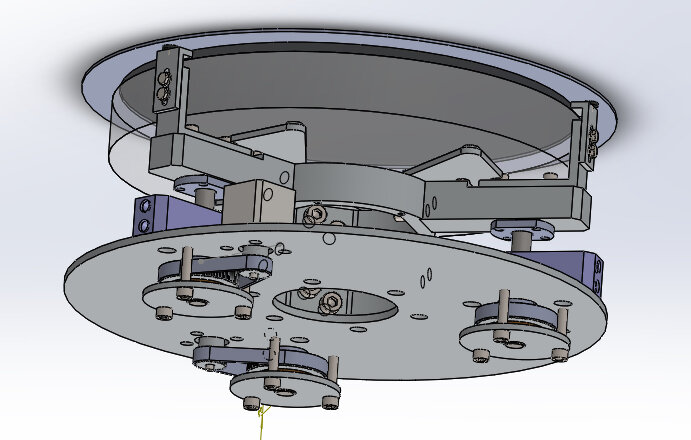
En fait, 2 motorisations sont suffisantes pour la collimation du primaire. Le 3ème point peut rester manuel, au cas où. Tu peux nous en dire plus sur ton système, histoire qu'on ne te propose pas la même chose 🤔 On peut effectivement concevoir un système manuel avec 2 tringles longues, manœuvrables depuis la cage secondaire, et une transmission par courroie crantée à l'arrière du barillet primaire. Tout dépend de la "morphologie" du barillet primaire. Une motorisation comme le propose adamckiewcz est également possible, à l'aide de 2 motoréducteurs en prise directe sur les vis de collimation ou par l'intermédiaire de courroies crantées. Ce genre de motoréducteur permet d'avoir un couple important et le fonctionnement en 12V continu permet d'avoir 2 sens de rotation : https://fr.aliexpress.com/item/1005002760195229.html?spm=a2g0o.productlist.0.0.4a3e5ccfDOIFF2&algo_pvid=3d0ca8fb-3eb5-443a-b9e6-4aa27ac292f7&algo_exp_id=3d0ca8fb-3eb5-443a-b9e6-4aa27ac292f7-0&pdp_ext_f={"sku_id"%3A"12000022055921018"} Il existe des modèles avec des vitesses de rotation différentes, ce qui permet de choisir la vitesse de réglage adaptée au besoin. Il est également possible d'alimenter ce type de moteur avec une tension différente. Sur un de mes systèmes, j'ai intercalé un module step-down (abaisseur de tension), ce qui permet d'obtenir 2 vitesses de rotation au choix par simple commutation. Vu que ce modèle dispose d'un renvoi d'angle, il occupe moins de place à l'arrière du télescope. Et un boitier avec les boutons qui permettent de faire tourner chaque moteur dans un sens ou dans l'autre, et le tour est joué .... enfin presque ! J'utilise ce modèle pour un obturateur de lunette. Je confirme que le couple est important. Il est nécessaire par contre d'adapter de type de motorisation en fond de télescope, ce qui nécessite quelques connaissances techniques et le cas échéant, d'être en mesure de fabriquer les pièces soi-même. Les faire fabriquer est tout à fait possible, mais cela revient forcément plus cher. Pour l'anecdote, je m'étais "amusé" à concevoir un barillet primaire motorisé pour mon newton de 300 : 3 moteurs pas à pas avec transmission par courroies crantées permettent de faire de la collimation (rotation d'un seul moteur) et de la focalisation (rotation simultanée des 3 moteurs), ce qui permet la suppression du focuser au niveau de la cage secondaire). Vu qu'il n'est pas possible de bloquer le barillet primaire après collimation, il est nécessaire d'avoir des systèmes avec suppression des jeux, notamment au niveau des parties filetées. Comme quoi, on peut imager tout un tas de choses.
-
Quelque part, c'est rassurant, mais Didier pourrait quand même répondre ne serait-ce que succinctement aux mails, histoire de temporiser la vrai réponse. Parce qu'aucune réponse aux mails, sms, appels et autres depuis début août, il y a de quoi se poser des questions.
-
collimation du primaire par déplacement de la cage du secondaire
Discret68 a répondu à un sujet de Fred13115 dans Les bricoleurs
Sur quelle image voit ton les vis de collimation du primaire ? Je me demande si ça ne serait pas plus facile d'avoir les 6 tubes fixes et de mettre un dispositif de réglage (donc 3 au total) au niveau des fixations sur la cage secondaire. -
Bonjour à tous. Je suis en contact régulier avec Didier Chaplain qui m’usine tout un tas de pièces. Depuis début août, plus aucune réponse de sa part. Mails, sms, appels téléphoniques, silence complet !! Ça devient inquiétant. Quelqu’un aurait -Il réussi à le joindre depuis début août ? Ou aurait des informations sur ce qui se passe ? JP
-
Ça commence à sentir bon pour le successeur de Hubble : https://www.air-cosmos.com/article/le-tlescope-spatial-james-webb-sur-le-dpart-25274 Va falloir commencer à serrer les fesses pour que tout se passe bien