alphamax
-
Compteur de contenus
204 -
Inscription
-
Dernière visite
Tout ce qui a été posté par alphamax
-
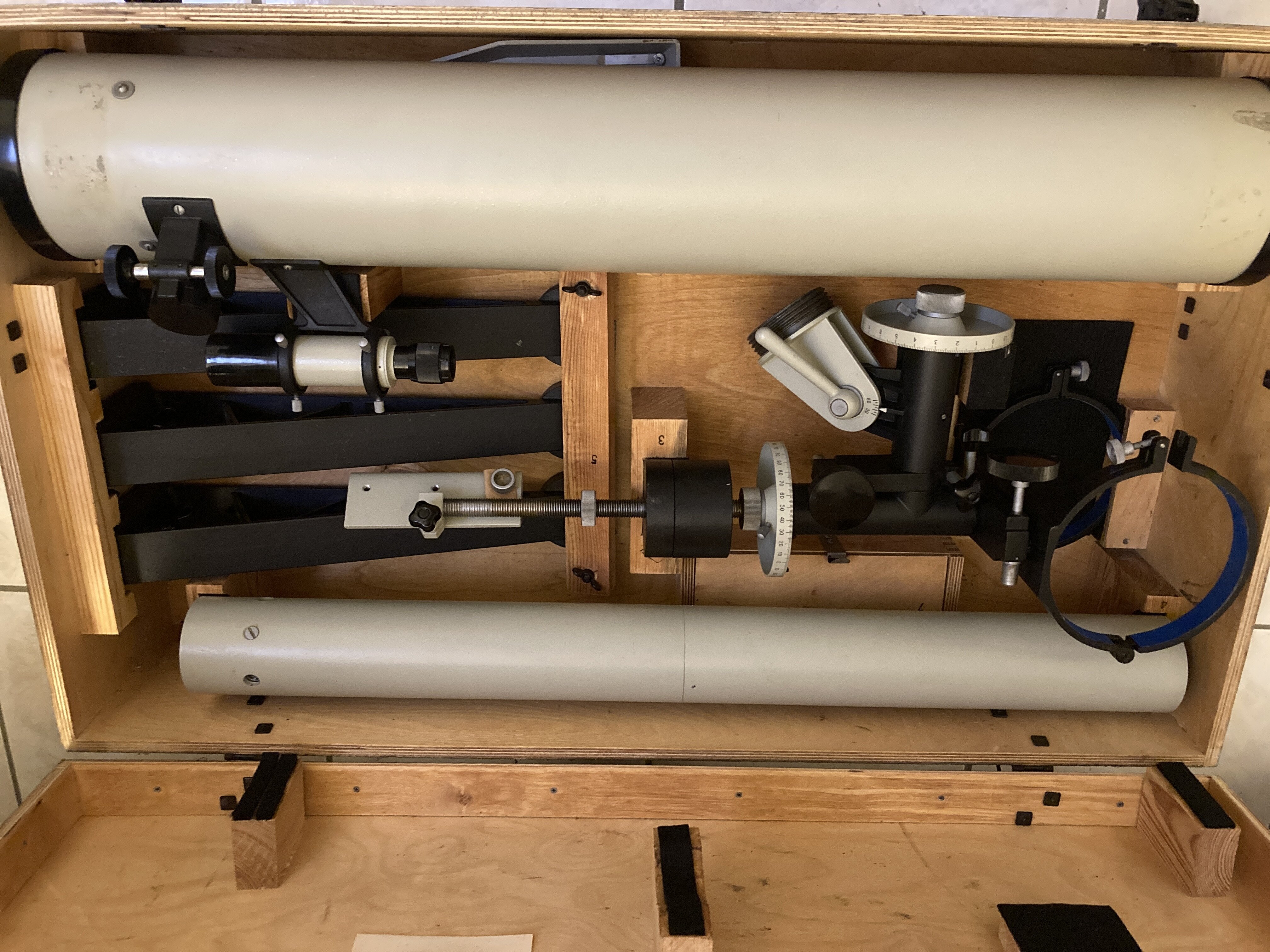
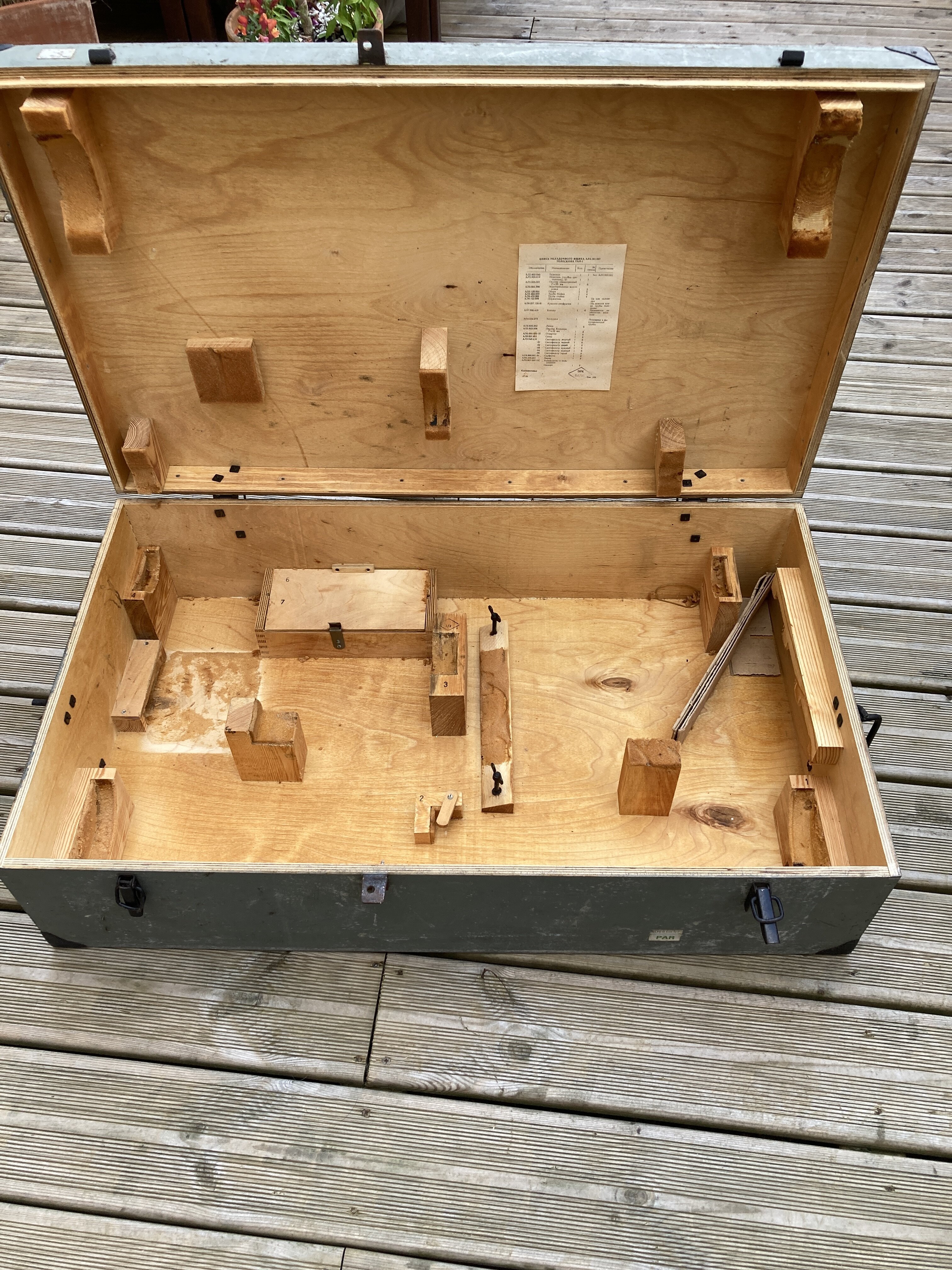
Bonjour, merci pour tous vos messages et vos liens. De ce que j'ai pu voir (entre 2 averses et 100 nuages), l'image dans le 25mm n'est pas trop mal, plutôt claire. J'ai refait toutes les mousses de la caisse (elles étaient d'origine, donc complétement pourries). Voici ce que ça donne ça une fois tout remis dedans :

-
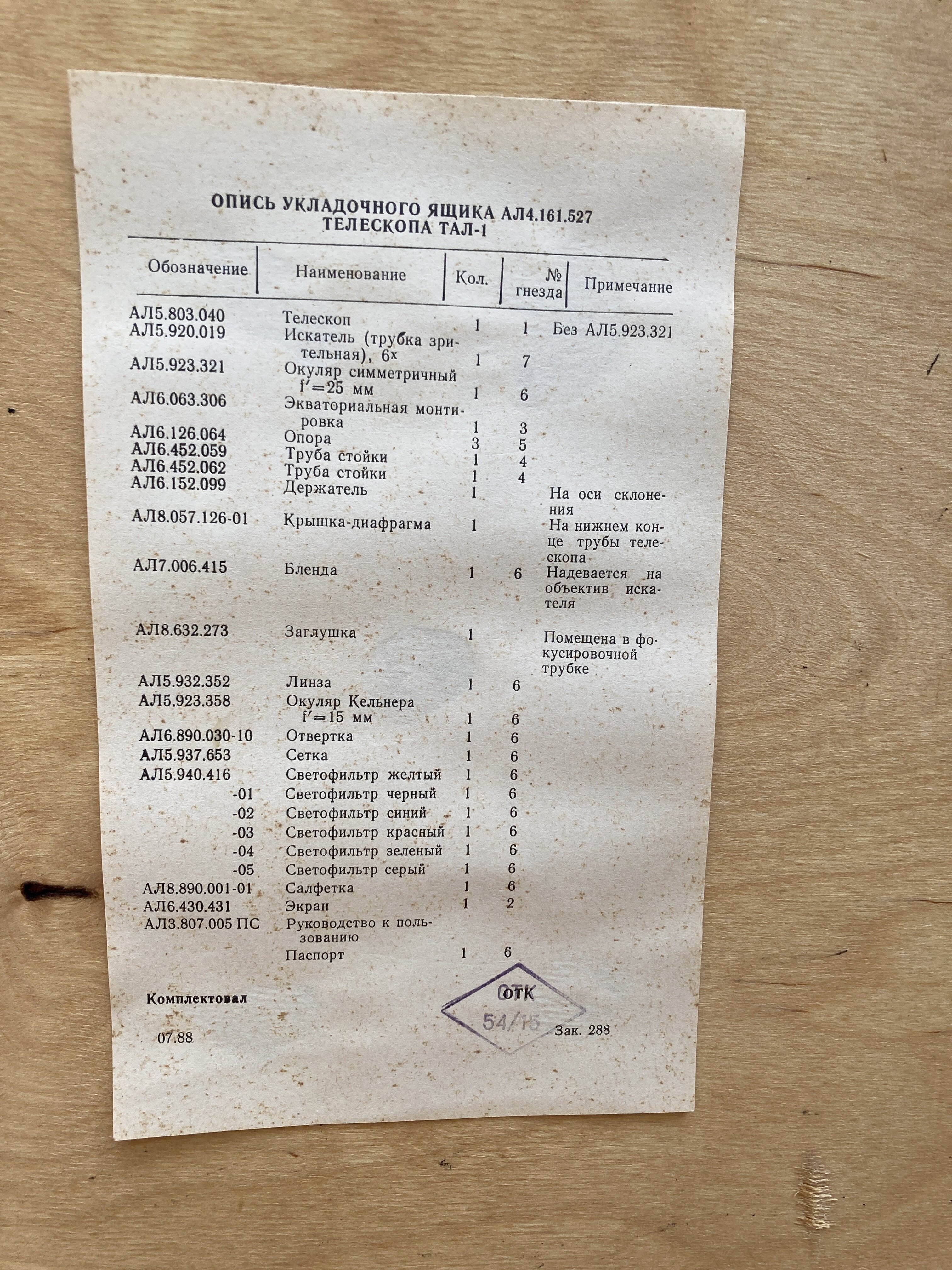
Hello, je voulais vous faire partager une petite acquisition récente... Un petit TAL des années 80 je pense tout complet avec sa boite de transport. J'ai malheureusement pas eu encore l'occasion de le tester mais d'ici 2025 je devrais bien trouvé une trouée dans les nuage. Il est dans en assez bon état les seules traces que j'ai sont dû à la mousse à l'intérieur de la boite qui avec le temps s'est dégragée et a collé aux différentes pièces. Kris
-
Recherche aide fonctionnement HEQ5 Pro en Ile-de-France
alphamax a répondu à un sujet de mae_photographer_ dans Support débutants
Hello, oui, depuis plusieurs années j'ai une atlas (version orion de l'eq6). Je vais surtout du pilotage via l'ordi mais bon, les principes sont les mêmes. K. -
Recherche aide fonctionnement HEQ5 Pro en Ile-de-France
alphamax a répondu à un sujet de mae_photographer_ dans Support débutants
Hello Maëlan, je suis du coté de Vélizy, si tu veux de l'aide n'hésite pas... Souvent une bonne explication devant le matos permet de bien mieux comprendre. Avant d’acheter du matos supplémentaires, déjà bien exploite bien celui que tu as. Au plaisir si tu veux Kris -
specification sv205
alphamax a répondu à un sujet de gabrielamelie dans Matériel astrophotographique
Hello, c'est bien la résolution en photosite. Mais c'est 3264x2160. Après, faut jouer avec le binning pour regrouper les photosites (et donc réduire la résolution; 2x2 tu divises par 2, etc...) Par contre, elle n'est pas du tout faite pour faire du CP (ou alors peut être en lucky imaging) car temps de pose max 1s (1000ms) ! -
Calcul position planètes: code d'exemple C/C++ optimisé arduino
alphamax a répondu à un sujet de HPMâd dans Les bricoleurs
sinon tu peux effectuer tes calculs via les éléments orbitaux qui consomment beaucoup moins de mémoire mais la précision sera moindre.. Après, pour un push-to sur une eq3 c'est peut être bien suffisant (c'est très bien expliqué dans le livre de Jean Meeus Astronomical Algorithms et tu trouveras plein de ressources sur le net pour l'implémentation). -
Calcul position planètes: code d'exemple C/C++ optimisé arduino
alphamax a répondu à un sujet de HPMâd dans Les bricoleurs
Hello, fait une recherche avec le terme "VSOP" (variation séculaire des orbites planétaires). C'est très largement utilisé dans les logiciels de carto et ce n'est pas très difficile à implémenter (regarde là : https://www.neoprogrammics.com/vsop87/source_code_generator_tool/index.php). C. -
output.mp4 On animation de celui du 16/08... Regardez bien l'échelle de temps en bas à droite pour vous donner une idée du temps que cela a durée...
-
Hello, je suis en train de faire le tri dans mes captures du mois d'aout de ma allsky et voici quelques compilations intéressantes : output.mp4 output.mp4
-
en fait, c'est la trace de la combustion du météore que je peux suivre jusqu'à 0h58... Ce que je regrette le plus c'est de ne pas l'avoir vu un autre beaucoup moins spectaculaire
-
Hello, une superbe météorite avec trace persistante... pendant environ 10mn...
-
Hello Manu, soit tes drivers font partis du pack indi de base et tu dois juste faire le cmake qui va bien (tu as toutes les instructions pour les construire ici : https://github.com/indilib/indi) ou bien si c'est une partie de indi-3rdparty, tu dois suivre les instructions suivantes (il faut le faire drivers par drivers dont tu as besoin) https://github.com/indilib/indi-3rdparty N'hésite pas à me poser des questions Christian
-
Hello, excellent !! 23€ la paire en plus... merci pour l'info Kris
-
Hello, déjà, les réducteurs de focales ne sont une science exacte malheureusement. Déjà, fait une map avec un masque de bathinov et regarde ce que tu dis hocus focus ensuite (sans bien sûr toucher à la map). Ensuite pour connaître la focale, passe une image dans astap et regarde ce qu'il te donne comme valeur de focale. Bon courage. Kris
-
Utilisation d’un APN pour faire un alignement dans Kstars/Ekos
alphamax a répondu à un sujet de Prof2bécher dans Logiciels
alors ça n'a rien à voir ! l'alignement polaire va te permettre d'avoir ta monture bien dans l'axe de rotation de la terre... Plus c'est précis meilleure sera ton suivie. Donc, toujours faire l'alignement polaire surtout que depuis quelques versions, il est vraiment bien fait. Et l'astrométrie va te permettre de pointer une cible avec une grande précision et tout ça sans que tu te prennes la tête à faire le pointage... -
Utilisation d’un APN pour faire un alignement dans Kstars/Ekos
alphamax a répondu à un sujet de Prof2bécher dans Logiciels
Hello, oui, c'est possible et ça fonctionne très bien. Je le fais avec mon vieux EOS1000D sur mon C8 et ça match à tous les coups. -
Hello JP, alors, non, je n'ai pas (encore) prévu l'auto-adaptation du temps de pose (à vrai dire, j'ai pas bien compris comment fonctionne le mode auto chez zwo et la doc c'est la misère). Par contre, tout est configurable en ligne de commande (jusqu'à ce que tu veux incruster). Pour les darks, pareil, c'est toi qui décide comment ils sont utilisés (tu peux par temps de pose et/ou température et/ou gain et/ou offset ....). La température seule ne me paraissait pas suffisante pour extraire le dark. D'ailleurs, la différence est flagrante avec ou sans dark. Tiens, pour te donner une idée, voici l'aide en ligne : -f {name} : file name of capture. See below for variable substitution. Default : night/capture_%L.jpg -g {value} : define a gain value (%G). Default : 70 -e {value} : exposure time in µs (%E). 1000000 => 1s. Default : 64 -q {value} : image quality/optimisation. 0 - 9 for png optimization (0 quick, 9 light), 1 - 100 for jpg compression -t {name} : image type. "jpg" or "png". Default : "jpg" -v {value} : image depth. 0 raw 8 bits, 1 RGB 24, 2 raw 16 bits, 3 Y8. Default : 0 -l {value} : log level. 0 error, 1 warning, 2 info, 3 debug. Default : 1 -c {value} : camera ID to use. Default : 0 -s {name} : dark file name will be subtracted. Default : dark/dark_%S-%G-%E.png -u {0|1} : 1 for subtract dark file, 0 for not. Default : 1 -i {0|1} : display information on image. 1 display, 0 doesn't display. Default : 1 -L {value} : string overlay. Default : "T[%d/%m/%Y %X]E[%s]S" -o {value} : offset/brightness camera value (%O). Default : 0 -p {value} : font number -b {value} : set usb bandwidth. Default : 50 -x {value} : information position. 1 top left, 2 top right, 3 bottom right, 4 bottom left. Default : 3 -R {value} : Red composante. Only for color camera. Default : 74 -B {value} : Blue composante. Only for color camera. Default : 81 -H {0|1} : 1 for high speed mode, 0 for not. Default : 0 -D {0|1} : 1 for create directory if doesn't exist, 0 do nothing. Default : 1 -m {value} : gamma value. Default : 50 -N {value} : value that must be used to file name (%N) Variables substitution (%) accepted into file name (capture and dark) : %L : long date time (YYYYMMDD_HHMMSS) %D : date (YYYYMMDD) %T : time (HHMMSS) %S : sensor temperature %O : offset %E : exposure time in ms %G : gain %J : day %M : month %Y : year %N : number passed throught -N parameter %V : image type. 0 for raw 8 bits, 1 for RGB 24, 2 for raw 16 bits, 3 for Y8 Overlay syntaxe : T[...] : display time. Use date format E[%u|%m|%s|%M|%h] : display exposure on unit define G : gain S : sensor temperature O : offset M : gamma Example for night file: capsky -e 1000000 -g 60 -l night/night_%L.jpg -q 95 -t jpg -u 1 -s dark/dark_%S-%G-%E.png -x 3 will be product night file like night/night_20220726_020300.jpg and use dark like dark/dark_20-50-100000.png Example for dark file : capsky -e 1000000 -g 60 -u 0 -f dark/dark_%S_%G_%E.png -t png -q 5 J'utilise un script shell pour la partie allsky dont le but principale est d'attendre le moment où le soleil se couche et d'arrêter quand c'est l'aube. J'ai également quelques petits programme à coté pour par exemple checker que la camera est bien branchée. J'ai aussi un programme qui permet de connaître l'heure et le lever du soleil en fonction de la localisation et la hauteur du soleil qu'on souhaite. Me reste juste ce petit soucis d'image mais sinon j'ai une solution robuste, facilement maintenable (je ne sais pas si tu as regardé le code de allsky mais c'est une horreur pour un développeur). C.
-
Bonjour les astros, comme j'avais ma vieille ASI120MM (usb 2) qui traînait dans un tiroir, j'ai décidé d'en faire une caméra allsky. Jusqu'à présent, j'utilisais la panoplie de logiciel de Thomas Jacquin mais j'avais des latences entre chaque image que je n'arrivais pas à régler et je trouvais le tout un peu trop lourd pour mon besoin. J'ai donc entrepris de développer ma propre solution avec pour objectif la simplicité, la rapidité et la légèreté (ça doit tourner sans problème sur un raspberry pi 2 ou 3). Le tout développé en pur C avec opencv pour la partie soustraction du dark, incrustation vidéo et sauvegarde et bien évidemment la lib ASI (la dernière en date, cad 1.26). Tout fonctionne bien, j'arrive à faire des prises de 10s (j'aurais pu faire 20s...) avec entre chaque image pas plus de 2 ou 3 secondes de latences (je bosse sur une évolution afin de réduire encore cette latence). Cependant, pour une raison à laquelle je n'ai trouvé aucune explication, j'ai certaines images qui sont plus sombres mais on dirait que ça touche plus le premier plan (j'ai quelques arbres dans mon champ) que le fond du ciel (je mets 2 images, une "normale" et l'autre plus sombre). C'est pour cette raison que j'ai besoin de vous... Qu'est ce qui pourrait engendrer cette baisse de luminosité, de contraste, .... ? Est-ce que c'est un bug de la camera ? une mauvaise programmation ? Pour info, j'utilise le mode snap pour les prises et non le mode video (je ne sais pas si cela peu avoir un impact). Merci de votre aide. Christian