-
Compteur de contenus
1018 -
Inscription
-
Dernière visite
-
Jours gagnés
3
Tout ce qui a été posté par Astrowl
-

C'est bientôt les NEAF et déjà quelques annonces...
Astrowl a répondu à un sujet de Colmic dans Matériel astrophotographique
Peut être aussi, mais je ne pense pas seulement. C'est aussi le capteur que j'utilise dans l'Astrowlbox. Sur des systèmes embarqués comme ça, la puissance de calcul est beaucoup plus limitée que sur un ordinateur et il faut traiter les images à la volée sans bloquer le système ou sans trop le ralentir, donc la définition du capteur est un critère très important. Plus tu augmentes la définition et plus les traitements prennent du temps. Merci @turboIII, désolé je ne me rappelais pas, j'ai reçu quelques mails sur le sujet ! -
C'est bientôt les NEAF et déjà quelques annonces...
Astrowl a répondu à un sujet de Colmic dans Matériel astrophotographique
Je valide, je vais d'ailleurs en commander un par curiosité, mais je ne sais vraiment pas trop à quoi m'attendre concernant le rendu des images. Le budget est vraiment hyper serré au regard de toutes l'électroniques embarquées, du soft et même de l'optique. -
C'est bientôt les NEAF et déjà quelques annonces...
Astrowl a répondu à un sujet de Colmic dans Matériel astrophotographique
Oui mais voilà, la plupart des astrams ne sont pas en mesure d'installer tous ces logiciels libres, les paramétrer et les utiliser. C'est pour ça que les produits tout en un, déjà prêts à l'emploi sont plébiscités. C'est une chose de savoir que toutes les briques individuelles existent, s'en est une autre de rassembler toutes ses briques pour en faire un système homogène et stable. -
C'est bientôt les NEAF et déjà quelques annonces...
Astrowl a répondu à un sujet de Colmic dans Matériel astrophotographique
Tes images sont intéressantes, parce que je pense qu'elles sont bien plus proches de la réalité de ce qu'obtient la majorité des utilisateurs de ce type d'appareil, comparé aux belles images dont nous arrose ces fabricants. C'est peut être aussi pour ça que je pense qu'on trouve déjà pas mal de ces instruments d'occasion à la vente. Je t'invite à jeter un coup d'oeil au projet que j'ai lancé pour brancher un système ultra portable de visuel assisté au porte oculaire de n'importe quel instrument. L'avantage, c'est que tu n'es plus limité par l'instrument que le fabricant t'impose et qui est souvent un compromis discutable. Le désavantage, c'est que tu ne bénéficies plus des fonctionnalités de mise en station automatisée, ta précision de pointage est dépendante de la monture que tu utiliseras. -
C'est bientôt les NEAF et déjà quelques annonces...
Astrowl a répondu à un sujet de Colmic dans Matériel astrophotographique
Franchement je ne sais pas comment c'est foutu pour la gestion des stacks et si ça stacke à l'infini, mais bon au vu de la focale de l'instrument avant de constater une rotation du champ... Faut pas oublier que c'est un système 'quick and dirty', je doute que la plupart des gens stackent pendant 30mn sur la même cible. -
C'est bientôt les NEAF et déjà quelques annonces...
Astrowl a répondu à un sujet de Colmic dans Matériel astrophotographique
Merci @Axeldarkpor la citation. Le projet poursuit son chemin et je continue à alimenter les possesseurs de proto en mises à jour du soft interne avec nouvelles fonctionnalités et corrections. (stack en direct avec ajout de traitements à la volée : sharpen, gaussian blur, deconvolution, ...). En ce moment je finalise l'ajout du guidage ST4, simple à implémenter, mais pas simple à tester. J'ai arrêté la livraison de prototype pour me concentrer sur la finalisation du produit. Je ne sais pas si les fabricants comme ZWO ou autres s'intéressent à ce type de produits. Je pensais que les eVscope et Stellina auraient rapidement de la concurrence avec ces fabricants, mais force est de constater que ce n'est pas un créneau qui semble les intéresser. Je viens de voir l'annonce sur le Seesta S50 juste au dessus. Intéressant surtout à ce prix. Faudra voir ce que ça donne sur le terrain. Mais bon pour moi, rien ne vaut mon propre matériel, c'est pour ça que j'ai lancé le projet Astrowl. -
Lunette apochromatique Pro APO AP 152/1200 ED Triplet OTA
Astrowl a répondu à un sujet de roza dans Matériel général
Bien sur, et si tu obtiens une psf équivalente a la diffraction theorique de ton optique, c'est que tu peux te vanter d'avoir zero turbulence, un instrument parfaitement collimaté, en température... Bref difficile a obtenir. -
Lunette apochromatique Pro APO AP 152/1200 ED Triplet OTA
Astrowl a répondu à un sujet de roza dans Matériel général
Ca peut être une image théorique d'étalement d'une étoile, c'est ce qui est pratiqué en astro professionnelle, quand on combine l'image de plusieurs telescopes qui n'ont évidemment pas la même psf. D'ailleurs les résultats à partir d'une psf théorique même avec un seul instrument ne sont pas ridicules et peuvent donner des résultats intéressants, mais c'est mieux d'utiliser une vraie image issue d'une étoile captée à travers son instrument pour générer la psf et obtenir les résultats les plus probants. -
Projet Astrowl de visuel assisté
Astrowl a répondu à un sujet de Astrowl dans Matériel pour le Visuel Assisté
Merci pour les encouragements. Pour l'instant j'ai mis en pause la fabrication des boîtiers prototype qui me prennent pas mal de temps. Je veux, en priorité, finaliser la partie autoguidage ST4 qui apportera une vraie valeur ajoutée. J'ai encore de quoi faire quelques boitiers en proto, donc peut être que je les proposerai sous peu. -
Projet Astrowl de visuel assisté
Astrowl a répondu à un sujet de Astrowl dans Matériel pour le Visuel Assisté
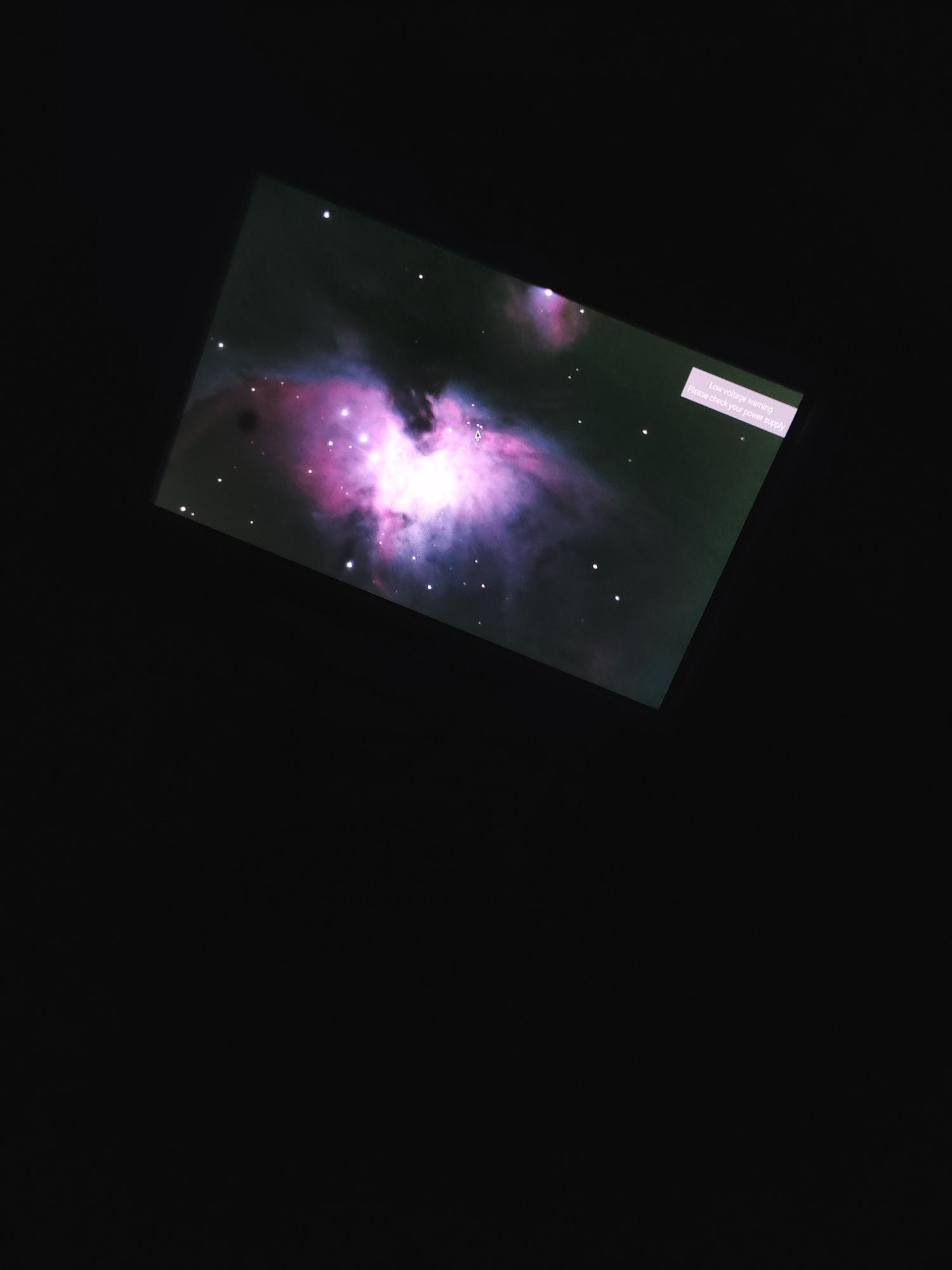
Bonjour Christophe, j'allais justement faire un post ! Bonjour à tous, une petit update sur le projet qui continue à avancer et approche de sa version définitive. J'ajoute également une photo d'une cession sur notre belle nébuleuse Orion. Malheureusement avec un calendrier chargé et une météo capricieuse, les sorties ont été très réduites. Sur la photos vous voyez un petit boitier avec des fils, il s'agit d'une première étape pour ajouter l'autoguidage ST4 au boitier. Le programme intègre déjà la fonctionnalité, mais il faut que je fasse les tests pour valider le bon fonctionnement. Pour les nouvelles fonctionnalités, il y a eu pas mal d'ajouts dans cette nouvelle version du programme : - Des nouveaux filtres sur le mode Stacking : Smart Sharpen, Median Blur, Deconvolution Richardson Lucy, Deconvolution Wiener (applicable sur l'image stackée ou sur chaque frame avant stacking, en mode test car en toute logique la déconvolution doit s'appliquer sur l'image stackée). Certains de ces filtres pourront être supprimés si pas convaincants. - Les prises de vue sont dorénavant au format PNG sans compression et perte d'informations, - L'image visualisée sur l'écran embarqué de la box peut également être visualisé sur n'importe quel appareil connecté à la box (smartphone, ordinateur, tablette, ...) Voilà, on approche de la version finale !
-
Salut @sebastien1976, j'ai un dobson sumerian de 250mm. L'oculaire quant on pointe au zenith n'est vraiment pas haut, je dirai autour de 1,20m voire moins, il faudrait que je le remonte pour te dire, mais je m'assied pour observer. Je ne sais pas si une telle hauteur est compatible avec ton installation. Et je me dis que si tu veux observer plus bas, je pense que ça serait jouable de l'installer sur une petite plateforme de levage pour moto par exemple (https://www.motea.com/fr/pont-elevateur-pour-moto-aide-a-la-manoeuvre-constands-hr1-mini-lift-mover-jusqu-a-500-kg-rouge-233000-0?gclid=5h0pp1n9-de&gclid=CjwKCAiAjPyfBhBMEiwAB2CCInEvz8CZCNiHRQVE71TPp00CaAbEVbHY41i_iNRXmm6qPDyH0Gi4VRoCoEsQAvD_BwE) en ajoutant une plaque en bois dessus (genre ça, il y a l'air d'y avoir une manivelle facilement accessible). Qu'en dis tu ?
-
La liste a été mise à jour. Les Taka ont fait des heureux 🙂 ! https://www.telescopes-et-accessoires.fr/Files/131989/destockage2023_MAJ1.pdf
-
Hum... Je demande vraiment à voir et on ne parle même pas de la qualité de polissage des lentilles qui va permettre de monter franchement dans les tours avec la TSA et qui laissera loin derrière les triplets chinois. Ce n'est d'ailleurs pas faire injure aux lunettes chinoises que de dire ça. Il y a juste deux philosophies différentes de fabrication qui d'ailleurs se retranscrivent dans le prix. Tu n'as pas pris le Mewlon 210 😁, il ferait sans doute doublon avec le CN212 ! Qui d'ailleurs a meilleure réputation. Je n'avais pas fait attention au prix du Mewlon en neuf (3565 €), quand je pense qu'il se vendait moins de 3000 € il y a 5 ans. Un bon placement finalement !
-
Projet Astrowl de visuel assisté
Astrowl a répondu à un sujet de Astrowl dans Matériel pour le Visuel Assisté
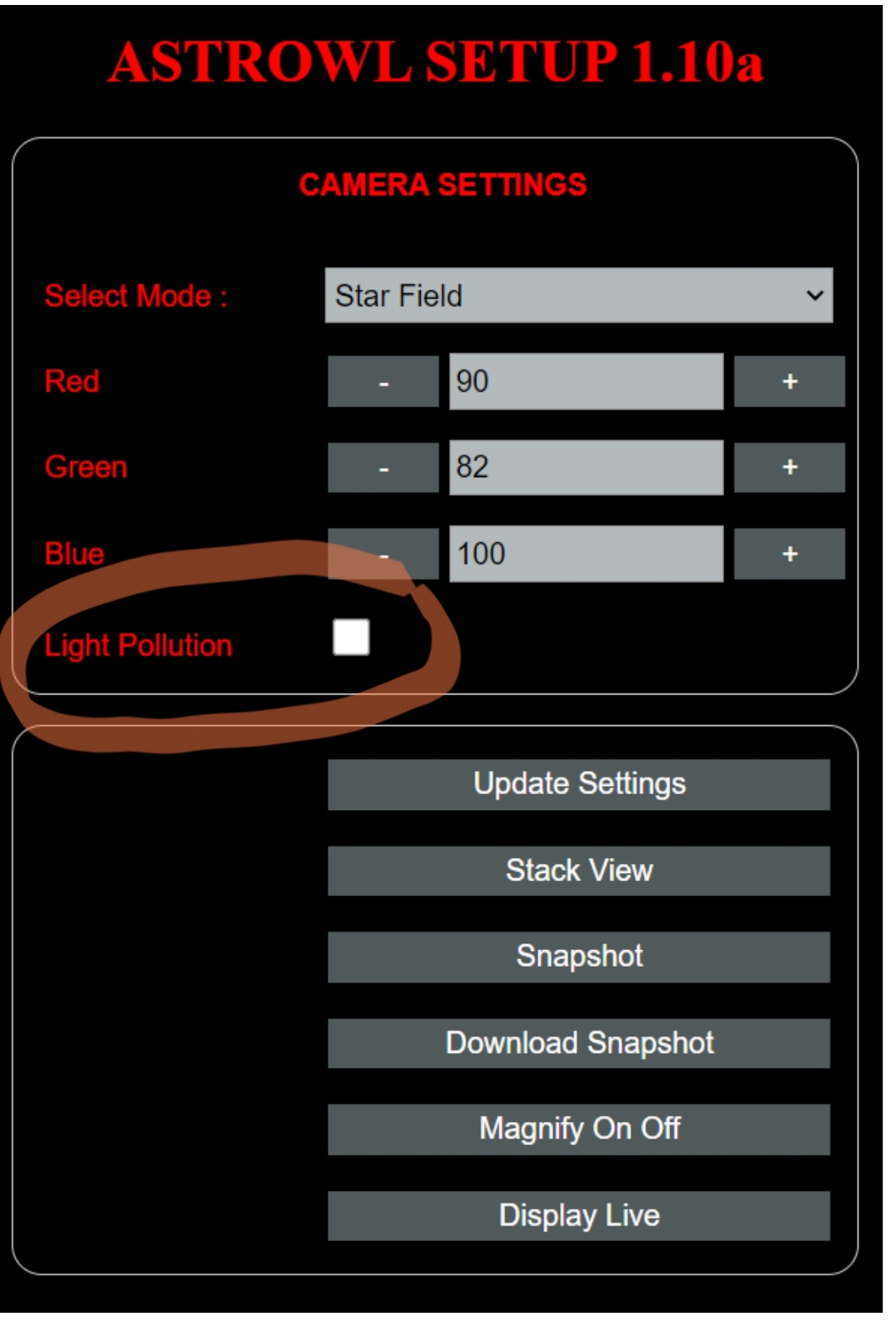
Quelques news sur les dernières fonctionnalités et améliorations de la box Astrowl. Si vous êtes tenté pour recevoir un prototype n'hésitez pas à me contacter. Ce sont les 3 ou 4 derniers proto que j'enverrai avant de décider de la prochaine étape du projet. Dorénavant les nouveaux proto sont distribués avec un boitier compatible T2. Du coup ça ouvre de nombreuses possibilités de connexions d'accessoires astro (correcteur, projection oculaire, vissage directement au porte oculaire, ...). Le logiciel a également été amélioré, les algo d'alignement automatique des frames en mode live stacking ont été améliorés et il est dorénavant possible d'activer un filtre de pollution lumineuse qui va noircir le fond du ciel.
-
Projet Astrowl de visuel assisté
Astrowl a répondu à un sujet de Astrowl dans Matériel pour le Visuel Assisté
Un petit test rapide de l'Astrowl Box hier sur Mars. Plus difficile que Jupiter, mais encore une fois en mode Visuel Assisté, Mars m'a révélé plus de détails via l'Astrowl Box qu'en visuel classique. L'image a été obtenue avec un Newton 200mm et deux barlows. Le ciel était pas mal turbulent, difficile d'avoir des moments de netteté. Par contre, je ne sais pas si les délimitations en bordure du limbe sont des artefacts liés à un autoalignement des frames perfectibles ou si c'est vraiment des détails de la surface
-
Projet Astrowl de visuel assisté
Astrowl a répondu à un sujet de Astrowl dans Matériel pour le Visuel Assisté
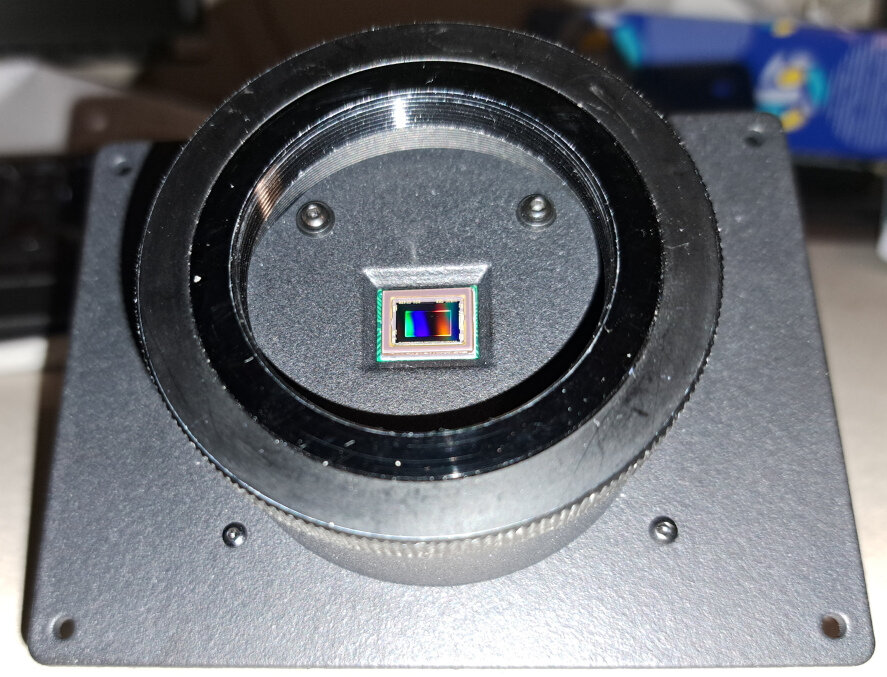
Bonjour à tous, Petites nouvelles du projet. Le logiciel bénéficie d'une nouvelle fonctionnalité qui m'avait été fortement réclamée et qui permet d'afficher sur l'interface utilisateur de l'astrowl box (qui tourne dans un navigateur type Chrome ou Edge) l'image également affichée sur l'écran embarqué de la box. Ce qui permet par exemple de partager l'image lors d'une soirée publique par exemple sur un grand écran. Ce n'est pas du live streaming, l'image est automatiquement rafraichie toutes les 5 secondes ou éventuellement en cliquant sur le bouton 'Reload View'. D'autre part, je remercie chaleureusement @gandalf pour m'avoir dessiné un nouveau boitier pour l'Astrowl box vraiment top. Ce boitier au-delà de son design nettement plus pro bénéficie d'une sortie T2 et non un 31.75mm comme précédemment (ci-joint quelques photos et une comparaison avec l'ancien boitier).
-
Projet Astrowl de visuel assisté
Astrowl a répondu à un sujet de Astrowl dans Matériel pour le Visuel Assisté
Salut Yves, je t'ai répondu en mp pour la batterie. Concernant le capteur il équipe pas mal de camera astro, mais ce n'est effectivement pas un capteur plein format. Il faut donc un suivi correct. Perso je fais une mise en station relativement peu précise juste en pointant la polaire, mais ça suffit très largement. Si ton suivi est approximatif, tu peux déjà pas mal te faire plaisir avec le mode live en poussant l'exposition. Un gars aux US qui utilise l'astrowl box ne veut utiliser que le mode live : https://www.cloudynights.com/topic/841605-astrowl-box-eaa/ et ses photos sont assez bluffantes. Perso je trouve que le mode stack est le plus important, mais comme quoi il n'y a pas une seule façon d'utiliser la box. -
Projet Astrowl de visuel assisté
Astrowl a répondu à un sujet de Astrowl dans Matériel pour le Visuel Assisté
Une nouvelle Jupiter prise avec l'astrowl box, la même que précédemment mais avec reequilibrage des couleurs. On distingue la tache rouge en bordure du globe en bas a gauche.
-
Projet Astrowl de visuel assisté
Astrowl a répondu à un sujet de Astrowl dans Matériel pour le Visuel Assisté
Ca dépend vraiment de ton instrument, sur une lunette ou un newton tu as moins de liberté que sur un SC ou similaire. Si tu arrives à faire la mise au point avec un renvoi 2", normalement tu devrais pouvoir le faire également avec la box dans le renvoi coudé. Mais il m'arrive de devoir utiliser un renvoi 1"25. -
Projet Astrowl de visuel assisté
Astrowl a répondu à un sujet de Astrowl dans Matériel pour le Visuel Assisté
Je vous joins deux images de Jupiter réalisées hier avec la box Astrowl sans post traitement (en dehors de ceux qui sont déjà intégrés à la box et que l'utilisateur peut choisir, Sharpen, Gauss Blur, Wavelet Denoise). Ces deux images ont été réalisées pour la plus grosse Jupiter avec un Mewlon 180 et la plus petite avec une apo 100mm et une Barlow 2x. Encore une fois l'objectif de ce système n'est pas vraiment la photo, mais surtout d'aider l'oeil là où il est moins performant. D'ailleurs l'objectif premier c'était les objets du ciel profond peu lumineux et finalement ça rend pas mal aussi en planétaire. La 2eme photo tend vers le vert, car j'ai un peu chargé la saturation 🙂 ! Le système d'auto alignement des frames s'est donc bien amélioré.
-
Projet Astrowl de visuel assisté
Astrowl a répondu à un sujet de Astrowl dans Matériel pour le Visuel Assisté
J'ai fait quelques publications sur le forum d'en face, mais je viens également donner des nouvelles du projet de ce côté ci. Le logiciel interne continue à évoluer, j'ai pu tester plusieurs méthodes d'alignement des frame (à noter que le logiciel en mode stacking aligne automatiquement les frames entre elles) et les dernières implémentations sont assez performantes. Je vous poste quelques photos réalisées sur Dumbell, M13 et Jupiter (avec une lunette apo de 130mm f/d 6 sans correcteur). La photo planétaire est assez délicate avec ce type de matériel, mais je trouve le résultat obtenu pas dégueu. Pour rappel, la photo n'est pas la finalité de l'astrowl box, qui vise surtout à seconder l'oeil là où il ne perçoit plus de détails. Le rendu est bien meilleur sur l'écran de l'astrowl box, car les images ne s'affichent pas en aussi grand format, donc elles apparaissent plus fines (mais c'est au final exactement ce qu'affiche la box sur son écran). Je suis en train d'ajouter un mode pour réduire la pollution lumineuse, que je testerai prochainement pour voir l'efficacité avant de le mettre dans la prochaine version logicielle. Plusieurs exemplaires du proto ont été distribués en France et aux US. J'espère que les personnes qui l'ont reçu, vont communiquer un peu sur leur ressenti et expérience. Il y a également un article sur l'Astrowl Box dans le dernier numéro d'Astrosurf Magazine (sept/oct) qui malheureusement ne s'appuyait pas sur la dernière version du logiciel. Et je continue toujours à faire grandir la communauté, donc si vous êtes intéressé pour recevoir un exemplaire n'hésitez pas à me contacter par MP. PS : Les traînées d'étoiles en haut sur la photo de Dumbell sont normales, car l'algo réplique les bords de l'image là où les frame ne se superposent plus en raison du décalage de suivi.
-
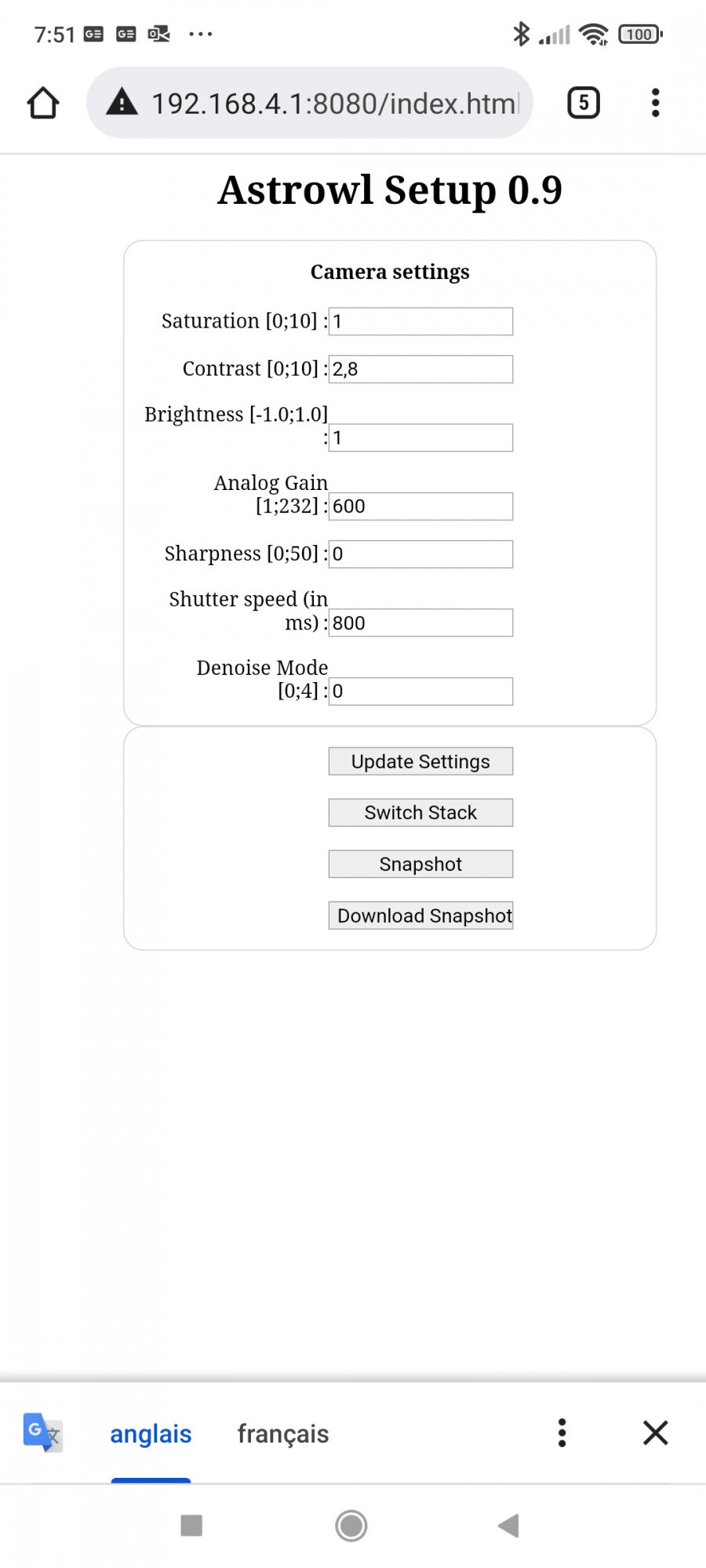
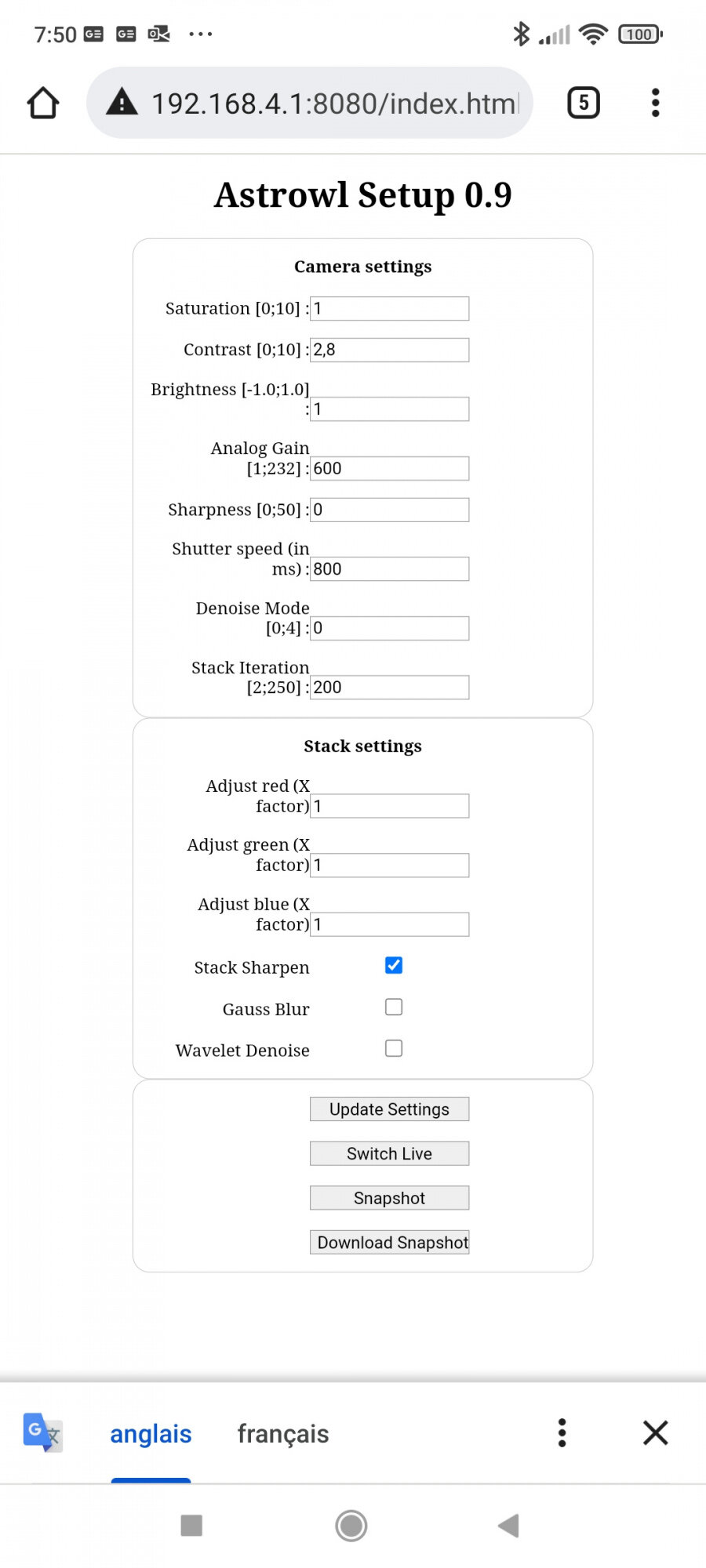
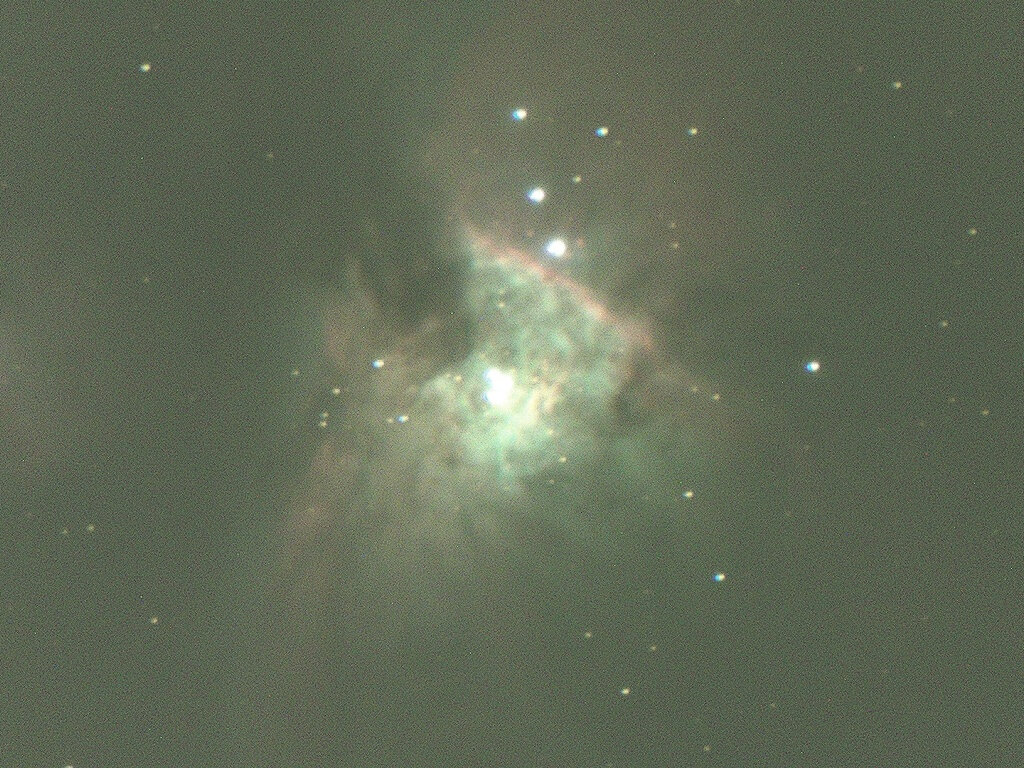
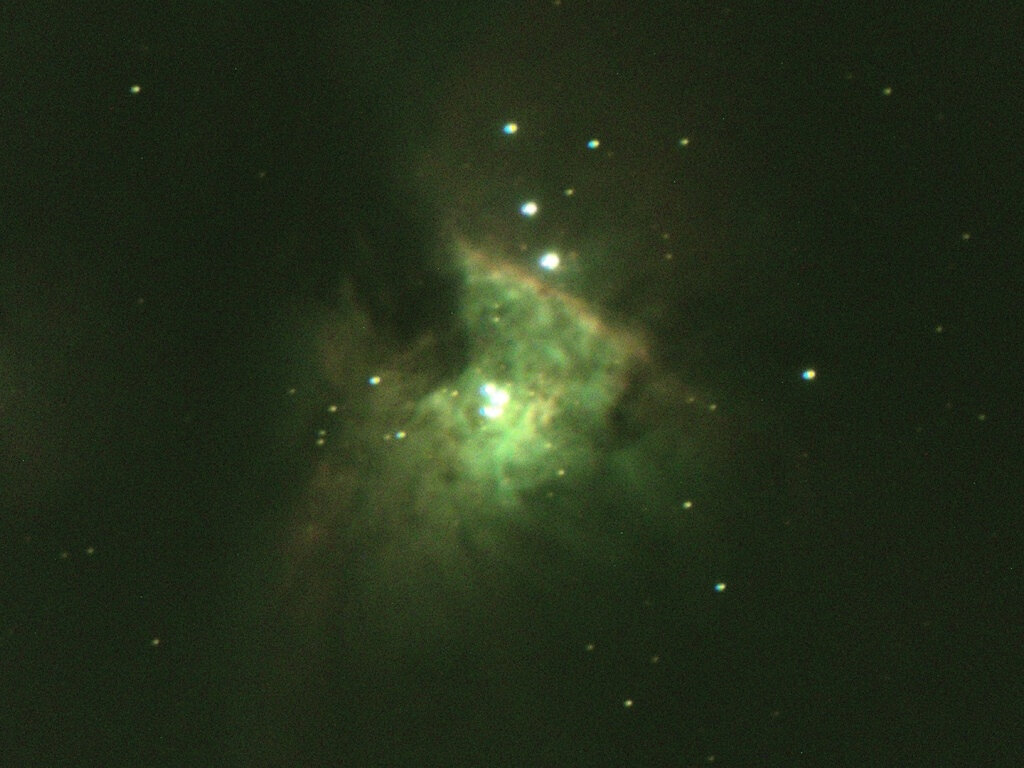
Bonjour à tous, Je voulais également partager avec vous, comme je l'ai fait sur le forum d'en face, les premiers résultats du projet que j'ai démarré il y a quelques mois. Ma pratique de l'astronomie est essentiellement visuelle. J'ai toujours été rebuté par la photographie, peut être par facilité, manque de temps et aussi par tout le matériel supplémentaire qu'il faut trimballer (caméra, guidage, ordinateur, ...). Je trouve déjà que le tube, plus la monture, les contre poids, les accessoires, ça fait déjà beaucoup à trimballer. Sauf que malheureusement le visuel a ses limites, beaucoup d'objet du ciel profond ne sont pas accessibles ou difficilement. De ce point de vue je trouvais le visuel assisté une bonne alternative, mais on retombe dans le côté pénible de l'astrophoto, il faut trimballer pas mal de matériel et je trouve que tout ce matériel éloigne un peu du contact avec le ciel, que j'apprécie par dessus tout. Je me suis donc lancé dans un projet de visuel assisté ultra portable, qui tiendrait limite dans la poche. J'ai donc travaillé autour d'un projet embarquant une caméra basée sur le capteur IMX462, un écran de 3.5 pouces et un programme permettant le traitement à la volée des images et leur affichage en "live". C'est ce programme qui est un peu le coeur du projet, il permet de changer pas mal de paramètres de la caméra, de voir le ciel en live ou de lancer du stacking en activant des filtres à la volée (sharpen, wavelet, gauss blur, ...), d'aligner les images (enfin de faire au mieux sans compenser un mauvais guidage) et de visualiser immédiatement le résultat et de prendre une photo souvenir :-). L'ensemble est pilotable depuis un téléphone, ordinateur ou tablette via connexion wifi. Je vous poste quelques photos du projet ci-dessous et les premiers résultats sur la nébuleuse d'Orion. Sur ces photos de la nébuleuse, faites preuve d'indulgence car le test a vraiment été fait à l'arrache sur une monture alt/az motorisée, pas de mise à niveau, sur un terrain sujet à vibration, une lunette de 130 en F/D 7 sans correcteur, ni réducteur, couronnés par un ciel ultra pollué de région parisienne, en résumé des conditions vraiment peu optimales. Tout d'abord l'interface de manipulation à la volée qui permet de changer les paramètres du mode live ou du mode stacking. Le proto de l'appareil en mode Frankeinstein, je prévois de le mettre dans un boîtier un peu plus reluisant, avant de faire un boîtier digne de ce nom. Et quelques images de la nébuleuse en testant plusieurs paramétrages. Elles sont brutes de décoffrage, sans aucun autre retraitement que ceux disponibles en live . Elles prêtent à sourire, j'en conviens, mais pour un premier jet en mode très dégradé, ça me semble intéressant. Je pense qu'avec un bon instrument et un bon guidage, ça peut vraiment dépoter. Je ne sais pas encore ce que peut donner le système sur du planétaire, il faudra patienter car les conditions ne sont pas réunies actuellement. D'ici là, le projet va avancer
- 131 réponses
-
- 10
-

-

-
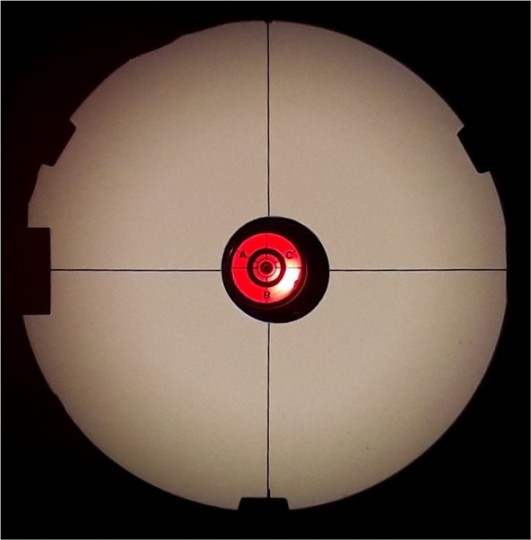
Bonsoir à tous, je voulais vous faire profiter d'une découverte que j'ai faite récemment sur le net à la recherche de solutions pour collimater telescope et surtout lunette. Concernant les telescopes les solutions sont multiples et efficaces (pointeur laser, cheshire, oeilleton). Mais pour ce qui est lunettes c'est déjà plus difficile à trouver. En cherchant j'ai fini par tomber sur cet instrument , qui prétendait permettre aussi bien la collimation de telescope que de lunettes en offrant deux formules de projection de motifs. Le prix avec les frais de port étant raisonnables, j'ai tenté l'expérience. Quelques jours après j'ai reçu l'instrument et je l'ai rapidement testé sur ma lunette. Le principe fonctionne un peu comme l'autocollimation, c'est à dire qu'il projette un motif qui par jeux de réflexion permet de faire coincider 4 leds. En l'utilisant (l'image obtenue est vraiment très parlante) j'ai constaté une légère décollimation, mais bien visible de ma lunette. J'ai ajusté les vis de collimation frontale (attention je n'ai pas touché les vis latérales qui permettent de centrer les lentilles et nécessitent un vrai savoir-faire) et le motif et collimation est devenu symétrique. J'ai trouvé l'instrument vraiment redoutable pour collimater de jour sa lunette. Je l'ai également testé sur un Newton et l'autre système de collimation est tout aussi efficace. Maintenant il ne reste plus qu'à vérifier sur le ciel l'efficacité du réglage. Voilà si certains sont intéressés, n'hésitez pas à me contacter je vous renverrai vers la personne qui les fabrique (un italien fort sympathique)














.jpg.086761e04721a5b57325b4985651b338.jpg)
.jpg.6dd2c178407ff212afc2a611b6a2fa76.jpg)