keymlinux
-
Compteur de contenus
830 -
Inscription
-
Dernière visite
-
Jours gagnés
3
Tout ce qui a été posté par keymlinux
-

Alternative au RPI4
keymlinux a répondu à un sujet de rmor51 dans Raspberry, Tinkerboard, etc... de Linux et astronomie
Bonjour, Il est vrai qu'avec la pénurie et des vendeurs qui proposent un rpi4 a plus de 200 euros, il deviens urgent de trouver des alternatives Si tu cherche a peu près les même specs qu'un rpi4, il faut voir du coté des différents modèles Orange Pi (ou aussi Banana Pi), mais je crains qu'ici aussi il y ait des problèmes d'approvisionnement) Un Orange PI avec un quad core, 4Go de ram, 16Go de stockage on le trouve à 125 euros https://orangepi.com/index.php?route=product/product&product_id=896 On peut y installer une distribution Ubuntu et en faire une nafabox Un autre alternative, même si cela me fend le coeur, c'est de se réfugier sur sun modèle de miniPC a processeur Intel, avec 4 à 8Go de ram et un processeur x86 (mais on peut aussi y installer une ubuntu + stars ekos et en faire une nafabox) Exemple ici un minipc avec un x86 dual core, 4Go de ram et 64 Go de stockage à 135euros (plus cher qu'un rpi4 au tarif "normal" mais moins cher qu'un rpi4 au tarif "actuel") https://www.amazon.fr/Nouvelle-Z83-F-Processeur-préinstallé-Automatique/dp/B07NZSYQ2N/ref=sr_1_19?keywords=orange+pi&qid=1679335020&s=computers&sr=1-19 Vu que 4Go de memoire c'est un peu juste, un modèle un peu plus pêchu mais moins compact sous la barre des 200 euros(quad core, 12 Go ram, 256Go de stockage) https://www.amazon.fr/Nouvelle-Z83-F-Processeur-préinstallé-Automatique/dp/B07NZSYQ2N/ref=sr_1_19?keywords=orange+pi&qid=1679335020&s=computers&sr=1-19 note: je n'ai pas testé personnellement ces alternatives, j'attend que le prix des rpi baisse (j'en ai plusieurs donc je ne suis pas pressé) Cordialement -
SIRILIC 1.15.12 pour SIRIL 1.2.3 ** Mise à jour **
keymlinux a répondu à un sujet de m27trognondepomme dans Logiciel SIRILIC de Siril et Sirilic
@m27trognondepommeBonsoir, je pense avoir détecté 2 anomalies dans cette version 1.15 1) Concernant le "register" en 2 passes et la commande "seqapplyreg", j'ai une anomalie si j'utilise l'option "drizzle" Dans le script généré par sirilic on obtiens les commandes suivantes: register pp_images -drizzle -2pass -layer=0 seqapplyreg pp_images Mais vu que le register avec option -2pass ne génère pas les fit et que c'es le seqapplyreg qui le fait, il faut appliquer l'option drizzle à cette dernière commande et avoir les commandes ci dessous: register pp_images -drizzle -2pass -layer=0 seqapplyreg pp_images -drizzle 2) Avec sirilic v1.2, si on utilise la compression des fit alors les fichiers générés sont des .fit.fz au lieu de .fit Pour le contenu des sequences ce n'est pas un problème, mais lors de la génération des master (offset/flat/dark/darkflat) ils se retrouvent nommés en .fit.fz, mais lors de leur utilisation sirilic code des commandes dans le script avec le nom sans l'extension .fz, cela génère un échec Modification préconisée: utilisation de .fit.fz au lieu de .fit si "setcompress" est different de "0" voir sujet ici Cordialement, Stephane -
Il ne faut pas les ajouter Le newton est annoncé avec un back focus de 69mm --> cela signifie que le foyer sort de 69mm par rapport au bord du porte oculaire rétracté. Si tu y monte un alpy600 avec module de calibration et de guidage, alors la fente d'entrée du spectre va être à 64mm de l'entrée de l'alpy et donc lors de la mise au point ton PO sortira de 5mm pour que le foyer du newton soit situé sur la fente d'entrée de l'Alpy. Derrière l'alpy, tu peut mettre une camera qui a entre 10.5 et 20mm de tirage optique, avec 13mm c'es OK tu pourra faire la mise au point. Important: il y a 2 mises au point: la mise au point du newton focalisé sur la fente de l'alpy, et en sortie de l'alpy, le flux du spectre lumineux étalé, qui doit être mis au point sur le capteur de la camera Tu peux télécharger la doc e l'alpy sur le site Shelyak https://www.shelyak.com/produit/alpy-600/ Cordialement
-
Ca coute combien cet oculaire?
keymlinux a répondu à un sujet de Brumeargentee dans Matériel général
Bonjour, Pour info, il y en a un en vente sur ebay pour 300 dollars US (vendeur au Texas) https://www.ebay.com/itm/134218635811 Cordialement -
Suite à la lecture (en diagonale) de la doc du K-3 J'ai une possible piste Chez Pentax il y a 2 modes longues poses, le mode B et le mode T Le mode B, c'est: on appuie sur le déclencheur, puis on relâche au but du temps voulu, le temps de pose étant le temps écoulé entre l'appui et le relâchement, c'est le mode normal souhaité Le mode T c'est: on appuie et on relâche le déclencheur, cela démarre la pose, et pour stopper la pose on appuie et relâche une deuxième fois Si ton Pentax est en mode T cela pourrait expliquer pourquoi tu obtiens une photo sur 2 avec l'intervalomètre externe (mais tu devrais avoir le même fonctionnement en utilisant le bouton de déclenchement à la main) Pour vérifier si le mode B fait du B ou du T, il faut aller dans les menus de config, preférences perso (menu C1), option 7 nommée "option mode B" qui peut prendre la valeur "Mode 1" ou "Mode 2". Le mode 1 est le comportement que l'on souhaite (pose B standard), le mode 2 c'est ce que pentax appelle la pose T. Ceci étant ce n'est qu'une piste, pas forcement la solution (si ton APN en en mode "pose T" tu devrais déjà t'en être rendu compte en faisant une pose bulb à la main avec le bouton de déclenchement) Cordialement
-
@lock042Bonjour. Je ne sais pas si il s'agit d'un comportement voulu ou d'un bug, mais la version 1.2.0 me génère des fichiers .fit.fz ou lieu de .fit Est ce lié au fait que je demande dans les options à compresser les fit ?, sachant qu'avec la version 1.0.6 je compresse aussi les fit et Siril me génère des .fit pas des .fit.fz Dans les scripts pour les séquences ce n'est pas vraiment un problème car le fichier sequence contient visiblement une option fz_flag et tant que l'on appelle des commandes avec des noms de sequences c'est OK, Siril trouve les fichiers. Le problème c'est quand on génère les master flat et dark, même si on utilise une option "-out=master-dark.fit" il y a systématiquement l'extension .fz qui est ajouté, et donc quand on veut utiliser le fit du master généré, si on demande à siril de prendre le .fit il ne le trouve pas Est ce une anomalie ou bien est ce voulu (dans ce cas je vais devoir modifier mes scripts ) note: test fait avec Siril 1.0.6 e 1.2.0-beta2 sous MacOS 10.14 Mojave (oui, un OS obsolete) Edit de dernière minute: une fois de plus cela confirme que lire la doc est important, c'est expliqué ici https://siril.readthedocs.io/en/latest/preferences/preferences_gui.html#fits-options Ceci étant mon opinion (qui vaut ce qu'elle vaut) c'est que l'ajout de cette extension .fz c'est galère, certains softs ne la gèrent pas Cordialement, Stephane
-
Non, il s'agit bien ici d'un test de l'intervallomètre avec un multimètre pour verifier sa logique. Les mesures confirment que l'intervallomètre fonctionne comme indiqué dans sa doc (ou aussi selon le schéma du bas dans l'image postée par Fred_76) Je ne vois pas de problème dans cette logique, mais vu que sur ton APN l'obturateur ne se ferme pas en fin de pose mais seulement lors du debut de pose suivante, je reste sur l'idée qu elle mode relevage du miroir est activé
-
@fbarca@lock042Bonjour. En tut cas sur MacOs Mojave 10.14 je n'ai pas ce problème d'affichage du menu "scripts"

-
Echec d'alignement sur SIRIL
keymlinux a répondu à un sujet de Steph_irn dans Aide SIRIL de Siril et Sirilic
Bon, ayant pris mon courage a 2 mains, j'ai refais les tests avec les images pleine taille (6000x4000px et pas 1500x1000px) Donc tu a bien utilisé ton objo à 300mm de focale (et pas 72) Mais la taille moyenne de tes étoiles n'est plus de 3.4 pixels (ce chiffre ne m'avais pas choqué car c'est ce que j'obtiens avec mon APN) mais 4 fois plus grosses, on est a 12 pixels, c'est pas bon, et le findstar avec ses paramètres par défaut zappe les étoiles trop grosses Donc ma première tentative d'alignement des 2 images est en échec (comme chez toi) Par contre en augmentant le paramètre "rayon" de 10 à 20 c'est Ok (onglet alignement, clique sur le bouton avec le dessin d'engrenage, une fenêtre PSF apparaît passe le rayon à 20, ferme la boite de dialogue et relance l'alignement global ciel profond) 1) 1er test d'alignement avec les param par défaut : échec 23:55:40: Alignement : traitement en cours utilisant la méthode : Alignement global (ciel profond) 23:55:40: Alignement global sur les étoiles : avec la mémoire actuelle et les limites de threads, jusqu'à 4 thread (s) peuvent être utilisés 23:55:40: Recalcule les informations d'alignement déjà existantes pour ce canal 23:55:41: Lecture du fichier FITS : test2_00001.fit, 3 canal(aux), 6000x4000 pixels 23:55:41: Image de Référence : 23:55:41: Findstar : en cours... 23:55:42: 239 étoiles trouvées dans l'image référence, canal #1 23:55:42: FWHMx : 13.28 px 23:55:42: FWHMy : 11.23 px 23:55:42: Alignement global sur les étoiles : en cours... 23:55:43: Lecture du fichier FITS : test2_00002.fit, 3 canal(aux), 6000x4000 pixels 23:55:43: Findstar : en cours... 23:55:43: Lecture du fichier FITS : test2_00001.fit, 3 canal(aux), 6000x4000 pixels 23:55:44: Sauvegarde du fichier FITS : r_test2_00001.fit, 3 canal(aux), 6000x4000 pixels 23:55:46: 1076 étoiles trouvées dans l'image 2, canal #1 23:55:46: Impossible d'effectuer un alignement sur les étoiles : essai #3. Image 2 écartée 23:55:46: Le traitement de la séquence a partiellement réussi, avec 1 image(s) en échec et temporairement exclue(s) de la séquence. 23:55:46: Temps d'exécution: 6.23 s. 23:55:46: Alignement fini. 23:55:46: 2 images traitées 23:55:46: Total : 1 en échec, 1 alignées. 23:55:47: Lecture du fichier FITS : r_test2_00001.fit, 3 canal(aux), 6000x4000 pixels 23:55:47: Séquence chargée : r_test2_ (1->1) 23:55:47: Fermeture de la séquence test2_ 2) 2eme tentative après le changement du paramètre "rayon" pour la detection d'étoiles 23:55:58: Lecture du fichier FITS : test2_00001.fit, 3 canal(aux), 6000x4000 pixels 23:55:58: Séquence chargée : test2_ (1->2) 23:55:58: Fermeture de la séquence r_test2_ 23:56:12: Alignement : traitement en cours utilisant la méthode : Alignement global (ciel profond) 23:56:12: Alignement global sur les étoiles : avec la mémoire actuelle et les limites de threads, jusqu'à 4 thread (s) peuvent être utilisés 23:56:12: Recalcule les informations d'alignement déjà existantes pour ce canal 23:56:13: Lecture du fichier FITS : test2_00001.fit, 3 canal(aux), 6000x4000 pixels 23:56:13: Image de Référence : 23:56:13: Findstar : en cours... 23:56:16: 426 étoiles trouvées dans l'image référence, canal #1 23:56:16: FWHMx : 12.43 px 23:56:16: FWHMy : 10.42 px 23:56:16: Alignement global sur les étoiles : en cours... 23:56:17: Lecture du fichier FITS : test2_00001.fit, 3 canal(aux), 6000x4000 pixels 23:56:17: Lecture du fichier FITS : test2_00002.fit, 3 canal(aux), 6000x4000 pixels 23:56:17: Findstar : en cours... 23:56:18: Sauvegarde du fichier FITS : r_test2_00001.fit, 3 canal(aux), 6000x4000 pixels 23:56:28: 1204 étoiles trouvées dans l'image 2, canal #1 23:56:28: Correspondance des étoiles dans l'image 2 : finie 23:56:28: Paires correspondantes initiales : 385 23:56:28: Paires correspondantes après ajustement : 380 23:56:28: Pts OK : 0.987 23:56:28: échelleX : 1.002 23:56:28: échelleY : 1.001 23:56:28: échelle : 1.002 23:56:28: rotation : +0.087 deg 23:56:28: dx : +160.98 px 23:56:28: dy : -1.20 px 23:56:28: FWHMx : 15.08 px 23:56:28: FWHMy : 9.93 px 23:56:30: Sauvegarde du fichier FITS : r_test2_00002.fit, 3 canal(aux), 6000x4000 pixels 23:56:30: Le traitement de la séquence a réussi. 23:56:30: Temps d'exécution: 17.52 s. 23:56:30: Alignement fini. 23:56:30: 2 images traitées 23:56:30: Total : 0 en échec, 2 alignées. 23:56:31: Lecture du fichier FITS : r_test2_00001.fit, 3 canal(aux), 6000x4000 pixels 23:56:31: Séquence chargée : r_test2_ (1->2) 23:56:31: Fermeture de la séquence test2_ Bilan: il faut absolument travailler la mise au point pour réduire la taille des étoiles. C'est facile avec un masque de bathinov sur un telescope, mais compliqué avec un objectif -->ce qui est compliqué ce n'est pas l'utilisation du masque, c'est de trouver un masque adapté aux courtes focales des objos -
Echec d'alignement sur SIRIL
keymlinux a répondu à un sujet de Steph_irn dans Aide SIRIL de Siril et Sirilic
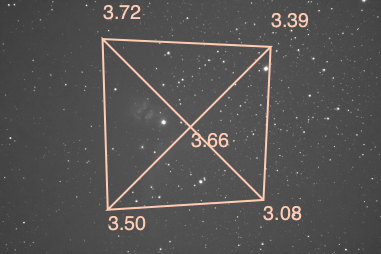
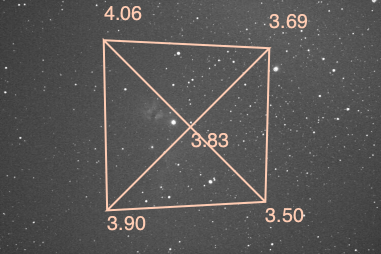
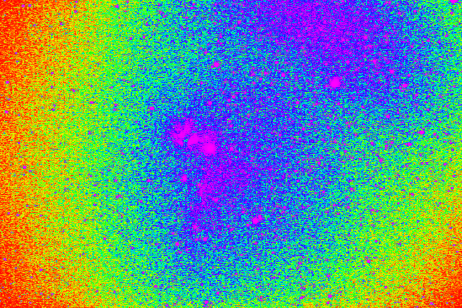
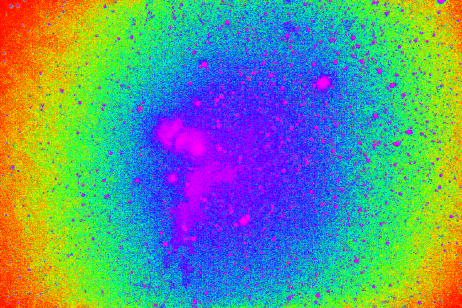
Oui, la 27 pas la 31 Concernant tes 2 brutes, mêmes en jpeg re-redimensionnées à 1500x1000 pixels (edit: oui parce que je suis un boulet, je n'ai pas enregistré tes brutes, mais seulement la vignette de prévisualisation et que je n'ai pas le courage de tout recommencer) j'arrive à les aligner avec Siril 1) analyse des 2 images (astrometrie +psf via Siril) 22:47:16: Lecture du fichier FITS : r_test_00001.fit, 3 canal(aux), 1500x1000 pixels 22:47:35: Résolution sur la zone sélectionnée : 0 0 1500 1000 22:47:35: Findstar : en cours... 22:47:36: Taille du catalogue NOMAD : 575 objets 22:47:36: 41 paires correspondantes. 22:47:36: Pts OK : 0.463 22:47:36: Résolution : 10.710 arcsec/px 22:47:36: Rotation : +5.41 deg 22:47:36: Focale : 72.22 mm 22:47:36: Pixel dim. : 3.75 µm 22:47:36: Champ de vision : 04d 27m 45.52s x 02d 58m 30.34s 22:47:36: Centre de l'image : alpha : 05h39m29s, delta : -01°58'11" 22:48:00: Findstar : en cours... 22:48:00: Temps d'exécution: 471.19 ms. 22:48:00: 297 étoiles trouvées dans l'image, canal #0 22:48:01: Findstar : en cours... 22:48:01: Étoiles: 297, Moyenne tronquée[FWHM]: 3.37, Tilt du capteur[FWHM]: 0.63 (19%), Aberration hors axe[FWHM]: -0.17 22:49:32: Lecture du fichier FITS : r_test_00002.fit, 3 canal(aux), 1500x1000 pixels 22:49:42: Résolution sur la zone sélectionnée : 0 0 1500 1000 22:49:43: Findstar : en cours... 22:49:44: Taille du catalogue NOMAD : 576 objets 22:49:44: 51 paires correspondantes. 22:49:44: Pts OK : 0.490 22:49:44: Résolution : 10.719 arcsec/px 22:49:44: Rotation : +5.44 deg 22:49:44: Focale : 72.16 mm 22:49:44: Pixel dim. : 3.75 µm 22:49:44: Champ de vision : 04d 27m 58.66s x 02d 58m 39.10s 22:49:44: Centre de l'image : alpha : 05h39m29s, delta : -01°58'16" 22:49:54: Findstar : en cours... 22:49:55: Temps d'exécution: 613.35 ms. 22:49:55: 377 étoiles trouvées dans l'image, canal #0 22:49:55: Findstar : en cours... 22:49:56: Étoiles: 377, Moyenne tronquée[FWHM]: 3.73, Tilt du capteur[FWHM]: 0.57 (15%), Aberration hors axe[FWHM]: 0.25 Constatations: A priori tu as utilisé ton objo 70-300 à 70mm de focale (EDIT: en fait non, à 300mm vu que tes images font 6000x400px mais que j'au utilisé des vignettes 4 fois plus petites !) Même si les étoile une sont pas parfaitement rondes c'est exploitable La taille moyenne des étoiles sur la session ne varie pas dans de trop grande proportion(10%) (de toute façon avec un app + objo on est pas sur le cas où on peut avoir un glissement de porte oculaire comme avec un telescope) Le centre calculé par astrométrie varie peu donc pas vraiment de décalage (quelques secondes d'arc pour une image qui couvre un champ de 4,5° par 3°) 2) Si je tente un alignement sur les 2 images c'est OK 22:34:42: Conversion : traitement de 2 fichiers ... 22:34:42: Lecture du fichier JPG : fic_1.jpeg, 3 canal(aux), 1500x1000 pixels 22:34:42: Nombre d'images autorisées dans la file d'attente d'écriture : 9 (zéro ou moins = illimité) 22:34:42: Lecture du fichier JPG : fic_2.jpeg, 3 canal(aux), 1500x1000 pixels 22:34:42: Sauvegarde du fichier FITS : test_00002.fit, 3 canal(aux), 1500x1000 pixels 22:34:42: Sauvegarde du fichier FITS : test_00001.fit, 3 canal(aux), 1500x1000 pixels 22:34:42: La conversion a réussi, 2 fichier(s) créé(s) pour 2 fichier(s) d'entrée (2 image(s) convertie(s), 0 échec) 22:34:42: Lecture du fichier FITS : test_00001.fit, 3 canal(aux), 1500x1000 pixels 22:34:42: Séquence chargée : test_ (1->2) 22:34:42: Temps d'exécution: 295.87 ms. 22:35:18: Alignement : traitement en cours utilisant la méthode : Alignement global (ciel profond) 22:35:18: Alignement global sur les étoiles : avec la mémoire actuelle et les limites de threads, jusqu'à 4 thread (s) peuvent être utilisés 22:35:18: Lecture du fichier FITS : test_00001.fit, 3 canal(aux), 1500x1000 pixels 22:35:18: Image de Référence : 22:35:18: Findstar : en cours... 22:35:19: 352 étoiles trouvées dans l'image référence, canal #1 22:35:19: FWHMx : 3.34 px 22:35:19: FWHMy : 2.85 px 22:35:19: Alignement global sur les étoiles : en cours... 22:35:19: Lecture du fichier FITS : test_00001.fit, 3 canal(aux), 1500x1000 pixels 22:35:19: Lecture du fichier FITS : test_00002.fit, 3 canal(aux), 1500x1000 pixels 22:35:19: Findstar : en cours... 22:35:19: Sauvegarde du fichier FITS : r_test_00001.fit, 3 canal(aux), 1500x1000 pixels 22:35:20: 367 étoiles trouvées dans l'image 2, canal #1 22:35:20: Correspondance des étoiles dans l'image 2 : finie 22:35:20: Paires correspondantes initiales : 332 22:35:20: Paires correspondantes après ajustement : 332 22:35:20: Pts OK : 1.000 Soit dans ta sequence il y a une ou plusieurs images qui posent problème (il faut les parcourir et sélectionner manuellement celle que tu veux garder, tu peux le faire facilement via siril en affichant la liste des images de la sequence), soit il y a un probléme avec les paramètres que tu utilise pour délecter les étoiles et pour faire l'alignement D'un autre coté je ne suis pas un expert de Siril (j'utilise beaucoup Sirilic qui me facilite les étapes de pré-traitement et d'alignement...), d'autres avis sont les bienvenus... Edit, en visualisant tes brutes en mode histogramme et en fausses couleurs pour metre en evidence les différences de luminosité on voit une anomalie Dans l'image ci dessous on voit un vignette a peu près normal (la zone rouge dans les coins est moins lumineuse que le centre bleu/violet), et on devine une petite sur-luminosité vers le haut a droite Dans l'image ci dessous il y a clairement une anomalie en haut à droite -> possible impact de la buée, mais possible que cela soit le lampadaire si au cours de la session tu est amené à viser de plus en plus en direction du lampadaire, d'autant plus qu'avec 70mm de focale tu cadre large (actuellement Orion e couche vers le sud ouest, si ton lampadaire est dans cette direction, plus la nuit avance et plus tu va viser bas et être de plus en plus impacté par le lampadaire, ce qui va créer du gradient sur l'image) Cordialement EDIT FINAL: vu que j'ai merdé en utilisant les vignettes et pas les images à la bonne resolution, et vu que le jpeg degrade l'image, peut tu poster les FIT ou raw CR2 (ou les mettre en download sur un google drive ou dropbox)
-
Il faut aussi verifier que l'option de relevage du miroir n'est pas activée dans les options de l'APN Cela peut expliquer pourquoi tu obtiens moitié moins de phots que voulu. Ue impulsion sur 2 sert a relever le miroir, et 1 sur 2 prend la photo Plus de details ici
-
Echec d'alignement sur SIRIL
keymlinux a répondu à un sujet de Steph_irn dans Aide SIRIL de Siril et Sirilic
Même avec un décalage, le nombre d'étoiles détectées ne devrait pa être très différent. On ne détectera pas les mêmes selon la zone visée, si les zones restent proches le nombre devrais varier de 20% (chiffre sorti du chapeau), pas d'un rapport 1 à 20 (sauf a viser un coup dans la voie lactée et l'autre coup l'étoile polaire). Par contre ce qui peut expliquer une forte variation du nombre d'étoiles entre les photos de la session ce sont un filé étoile (un bougé lié au vent par exemple si ton tube a une grosse prise au vent) ou l'apparition de buée (sur la lentille si lunette ou la lame de fermeture d'un SCT ou ménisque d'un MAK, sur le miroir secondaire si newton) ou un voile nuageux, ou bien une perte progressive de mise au point (porte oculaire qui glisse petit a petit au cours de la seance, j'ai deja eu le problème en visant des objets proche du zenith, mais pour la tête de cheval on ne devrais pas être dans ce cas. Autre possibilité pour l'échec d'alignement: si la première photo de ta séquence est pourrie, comme le soft compare les autres à celle ci il n'y aura pas d'alignement. Il me semble que tu devrais pouvoir choisir quelle image utilisée comme reference, prend la numéro 31 (ta tentative précédente y trouve 1638 étoiles, c'est que sur celle ci il n'y a a priori pas de problème de buée/nuage/mise au point) Question: tes fichiers se nomment TC_xxxx;fit, ce sont les brutes (light) ? ou des brutes pré-traitées avec les DOF ? (par défaut elles devraient alors se nommer pp_TC_xxxx.fit). Perso je fais l'alignement après pré-traitement pour éviter que les pixels chauds soient détectés comme des etoiles Pour verifier ton éventuel décalage sur la session, tu peux faire une resolution astrométrique sur ta 1ere brute et sur la dernière, cela va te donner les coordonnées du centre de ton image et tu verras le décalage subit entre le debut et la fin de la seance. Cordialement -
Bonjour, @Altheryon 1) Concernant la taille des fichiers fits, tu peux activer dans Siril une option de compression (choisir methode RICE, compressionn sans perte de qualité) Pour un fit 32bits de 6000x4000px on a un fit de 50Mo à 60Mo environ (4 fois plus gros si tu utilise l'option Drizzle de Siril, mais tu ne devrais pas pour débuter) Si tu peux poser ton fichier fit sur un dropbox ou drive gmail et nous envoyer un lien de téléchargement cela serait le plus simple pour les partages "gros volumes" 2) comme dit par @krotdeboukcela ressemble à un problème d'étirement de l'histogramme 3) pour les tutoriels, il y a aussi l'excellent tuto d'un membre du forum ci dessous Cordialement
-
Ce très triste vendredi 4 mars 1983.
keymlinux a répondu à un sujet de roger15 dans On fait une pause
Bonjour @roger15 En 1983 je n'avais que onze ans, et je n'avais découvert Tintin que peu d'années avant. L'aventure de Tintin qui à l'époque m'a le plus marqué était le diptyque "Le Secret de la Licorne" et "Le Trésor de Rackham le Rouge", car à cette époque j'étais bien plus passionné par les histoires de pirates et flibustiers que par la conquête spatiale. Le diptyque "Objectif Lune" et "On a marché sur la Lune" reste pour moi passionnant à lire, mais il n'a pas été la source de mon interêt pour l'espace. En fait parmi les oeuvres de BD qui ont suscité mon interêt pour l'espace il y a surtout un autre auteur belge, qui a travaillé pour le Studio Hergé, à savoir Roger Leloup, et son héroïne "Yoko Tsuno". Cordialement, Stéphane. -
Comment bien préparer voyage USA 2024 pour l'éclipse ?
keymlinux a répondu à un sujet de Klape dans Support débutants
Bonjour. A priori on ne vas pas être les seuls sur le forum à se retrouver au Texas en avril 2024... J'ai prévu d'y aller aussi, on va s'organiser un voyage avec un autre membre du club de Juvisy. Il va falloir anticiper pour la location de véhicule, mais aussi pour l'hébergement. Coté météo, on peut étudier l'historique pour dégrossir une zone à l'avance, mais tout va se jouer dans les derniers jours avant l'eclipse, donc il faut prévoir plusieurs spots distants autour d'un point central (hébergement) et pouvoir faire de la route pour choisir le spot en fonction de la météo locale le jour J Selon la zone où l'on sera l'eclipse se produira entre 16h et 20h UTC, le texas c'est UTC-6, donc eclipse entre 10h et 14h, cela laisse un peu de temps pour bouger le matin en partant tôt (risques d'embouteillages car on ne sera pas les seuls a bouger vers la zone de centralité) Cordialement -
Bonjour @entreplumeNous avons a priori les mêmes usages et les mêmes pratiques des NAS (et de Lightroom), par contre je ne fais pas de backup dans le cloud, je backup vers un autre nas hébergé sur un site de "secours" en remote (membre de la famille à l'autre bout de la France), cela permet de se prémunir des risques domestiques (y compris cambrioleur qui partirais avec mon nas...) @Kains1Comme déjà dit par @entreplume, un NAS c'est pour stocker, pas pour sauvegarder (rien ne t'interdit de modifier supprimer par erreur le contenu). En tant que stockage tu peux y stocker tout type de fichier, il n'y a pas de fichier supporté ou pas. La notion de format de fichier multimedia supporté ce n'est pas pour le stockage, mais pour les éventuels outils annexes proposés par le fournisseur du nas (comme les modules "Photo" et "videos" des nas Synology, ou encore le support du protocole DLNA par certains NAS (par exemple mon ampli audio sait contacter mon NAS en tant que périphérique DLNA pour lire les MP3 qui y sont stockés et indexés)
-
APN derrière un télé 42mm à vis
keymlinux a répondu à un sujet de jrgilis dans Matériel astrophotographique
@jrgilis Le Canon 50D est sorti en septembre 2008 et est a ma connaissance le premier Canon a utiliser ce capteur 15,1Mpixels, qui a ensuite été implémenté sur les 500D sortis en avril 2009 (c'est une habitude chez Canon, on propose le nouveau capteur sur la série à 2 chiffre, puis ensuite sur la série à 3 chiffres) --> tu devrais aussi chercher des photos astro faites avec le 500D Mon avis perso sur le 50D: le problème ce n'est pas la résolution du capteur mais sa sensibilité. Avec un capteur datant de 2008 il sera moins sensible que des capteurs plus recents. Moi perso, pour un usage exclusivement astrophoto, je prendrais un boitier plus recent, quite a rester sur des boitiers plus "amateurs" en numérotation à 3 ou 4 chiffres pour rester dans un budget equivalent, et quite a le dédier astro, si tu compte le faire de-filtrer il serait bon de verifier quels modèles sont plus facilement defiltrables que d'autres. Si par contre tu veux un appareil photo pour un usage astro et non astro ce raisonnement n'est plus forcement valable. (Ce paragraphe a été édité pour preciser les arguments valables en usage astro et ceux pour les autres usages) Exemple: J'utilise un Canon 80D (sorti en 2016), un collègue du club utilise un 800D (sorti en 2017), les 2 ont le même capteur 24Mpixels. Ce qui justifie la différence de prix entre les 2 boitiers sont des éléments techniques important en photo mais pas en astrophoto (la performance du mode rafale, la perf des modes d'autofocus et de suivi du mouvement, un viseur optique utilisant un penta prisme qui couvre le champ à 100% sur le 80D et seulement 85% sur le 800D, etc.... autant d'arguments dont on se fout totalement astro) Cordialement, Stephane -
Bonsoir voisin. Bienvenu sur le forum, où l'ambiance est effectivement sympathique, et on est tous là pour apprendre et s'entraider.
-
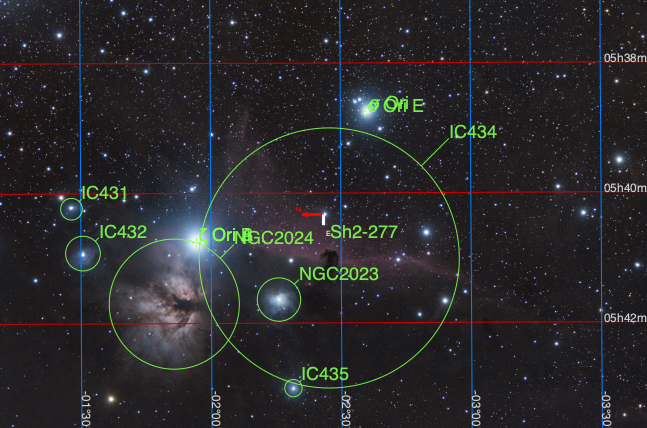
Bonjour, Tu peux télécharger et installer "Aladin", outil gratuit qui interroge la base de données du CDS (Centre de Données astronomiques de Strasbourg) http://aladin.cds.unistra.fr/aladin.gml Par exemple la petite galaxie juste au dessus de M106 sur ta photo c'est UGC 7356 (magnitude 17) http://simbad.u-strasbg.fr/simbad/sim-id?Ident=UGC++7356& Concernant ton image; c'est mes yeux ou bien il y a des halos violets ? 😉 Cordialement Ci dessous une copie d'écran Aladin dans la region de M106
-
Nébuleuses de la Flamme et de la Tête de Cheval
keymlinux a répondu à un sujet de keymlinux dans Astrophotographie
Il est très bien ton site, et l'idée de montrer pour chaque cible la progression est très didactique. Mais du coup je vais devoir poster mes versions de M31, M33, M42 et M45 😉(ben oui, on commence par les classiques...) -
Nébuleuses de la Flamme et de la Tête de Cheval
keymlinux a répondu à un sujet de keymlinux dans Astrophotographie
Merci, et j'en suis très fier de cette photo, c'est juste qu'elle es un peu "pâlotte", vu que le filtre IR de mon APN ne me rend pas service (mais je ne compte pas le faire défiltrer). D'ailleurs cela me dissuade de cibler des nébuleuses totalement rouges, trop peur d'être déçu et de gâcher une nuit de bonne météo (elles sont si peu nombreuses). Je tenterais quand même prochainement sur la Rosette histoire d'être fixé. -
Bonjour, Pour faire écho à la magnifique photo de @Jacques Jouan, voici ma modeste contribution sur le même sujet. @Jacques Jouan: pour répondre à ta question, j'avais posté l'image dans la Constellia, mais je n'avais pas fait de post dédié Après près de 4 mois de météo pourrie la semaine dernière nous a offert quelques soirées permettant de pratiquer sans nuages. Prises de vue réalisée le soir du 12/02/2023, dans le sud de l’Essonne, avec pas mal d'humidité et de la rosée sur le matériel (mais pas sur les lentilles). Il faudra que je fasse d'autres sessions sur la même zone pour ajouter du temps de pose. Ici j'avais planifié 3h, mais j'ai du jeter 4 poses de 3 minutes suite à un problème de suivi (problème informatique...). Les éléments techniques: 56 x 180s, ISO 800 DOF 20/-/30 (offset synthétique) Tube: Lunette SW Equinox 80/500 (avec aplanisseur non réducteur ES MPCC) Monture: SW AZ-EQ6 Guidage: Lunette guide 60/240 avec camera asi290mm mini Imageur: Canon 80D non défiltré Prise de vue/mise au point/guidage avec dithering/astrométrie pilotés par Kstars/Ekos/Indi sur un Raspberry Pi (Nafabox) Traitement Siril/Sirilic/Gimp (plugin Gimp PyGap-M27) La version postée ici est un export en JPEG 8bits réduit à 3000x1989px La résolution astrométrique (Siril): Pour ceux qui aiment vraiment les détails techniques... Empilement via Siril/Sirilic avec options 32bits et Drizzle Détails du post traitement Siril Recadrage (x=72, y=71, w=11860, h=7863) Extraction du gradient (Correction: Subtraction) Photometrie Deconv. (iter=20, sig=1.000) Transformation asinh : (stretch= 22.0, bp=0.00300) Transf. histogramme (mid=0.004, lo=0.001, hi=1.000) SCNR (type=0, qte=1.00, preserve=true) Rehaussement de la saturation (quantite=0.30) Détail du post traitement Gimp (plugin PyGap-M27) Make Dark Sky (iteration 4, opacité 20) Bon ciel à tous Cordialement, Stéphane
-
La tête de cheval comme je l'ai jamais eu :)
keymlinux a répondu à un sujet de Jacques Jouan dans Astrophotographie
Elle est magnifique ! J'ai imagé la même zone dimanche dernier avec une lulu, un APN non defiltré et 3 fois moins de temps de pose, donc même si je suis fier du résultat je dois bien avouer qu'il est loin d'égaler ta prise de vue. Bravo. Cordialement -
En fait pour la petite et grande ourse tu dois regarder vers le nord, mais maintenant la comète est visible au sud, elle est actuellement entre Mars et Aldebaran dans le Taureau. Ce soir à 20h CET elle sera visible plein sud
-
Gal Septette de Copeland, T250 f/4 et APM 1,5X.
keymlinux a répondu à un sujet de Pulsar59 dans Astrophotographie
Bonjour, Beau résultat sur ce groupe de galaxies que je ne connaissait pas. Au risque de passer pour un pinailleur, tu as ce qui me semble être un problème de poussière sur le capteur, générant des traces circulaires. Soit tu n'a pas fait de flat (cela serait dommage), soit les flat ont un problème où sont mal pris en compte au traitement. Ci dessous ton image ou j'ai mis en jaune les traces de deformation. Il y en a peut être aussi une en bas à droite, mais c'est léger et j'ai un doute (dès fois l'auto-persuasion nous joue des tours...) Cordialement