foudezic63
-
Compteur de contenus
15 -
Inscription
-
Dernière visite
Tout ce qui a été posté par foudezic63
-
Star Pointer, où comment pointer sans moteur :)
foudezic63 a répondu à un sujet de foudezic63 dans Les bricoleurs
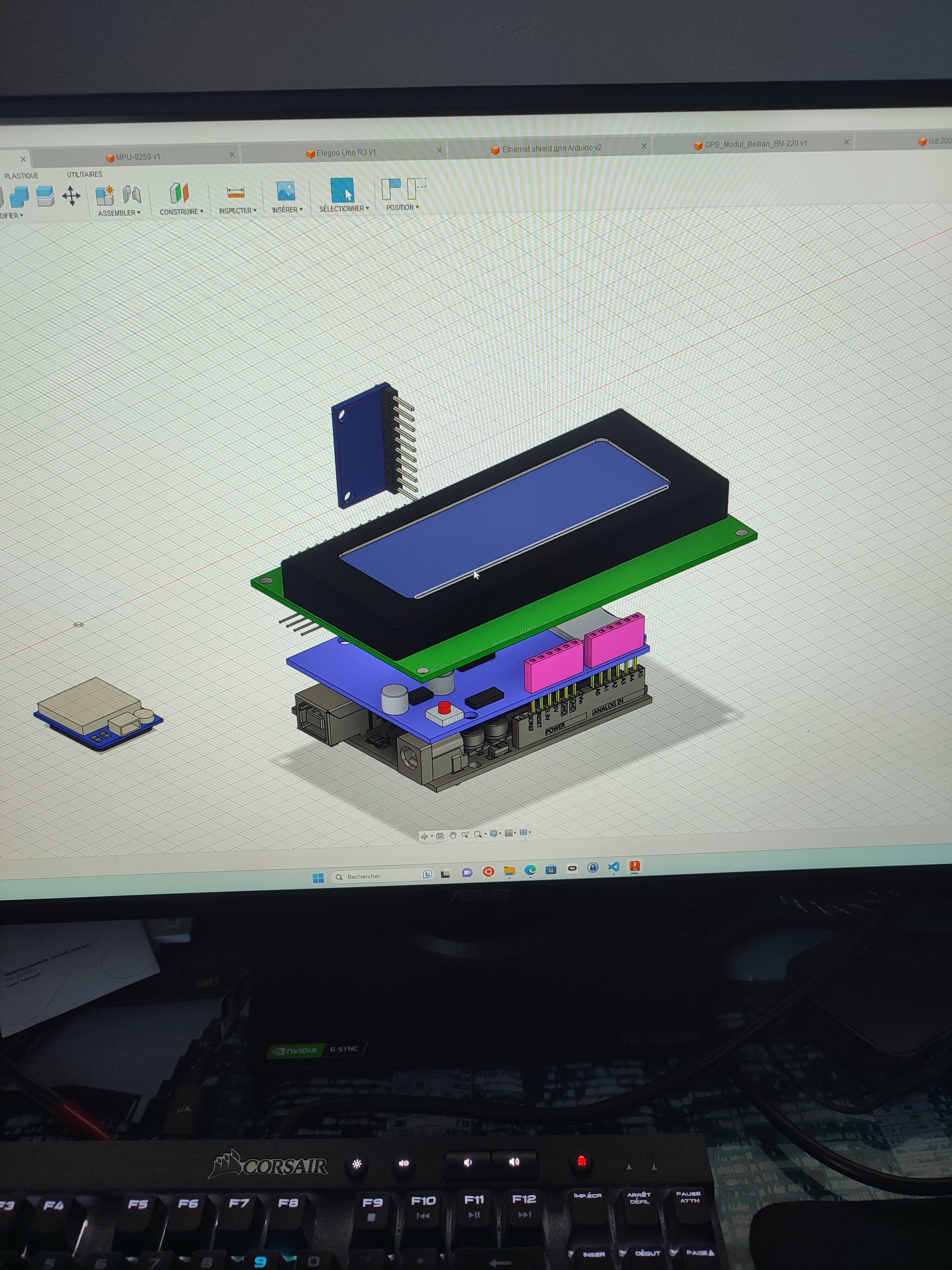
Voilà, j'ai attaqué la CAO. Première étape, récupération des modèles 3d sur le net, mise en place approximative. Il faut que je rallume le montage, histoire de mettre l'accéléromètre dans le bon sens 🤣
-
Star Pointer, où comment pointer sans moteur :)
foudezic63 a répondu à un sujet de foudezic63 dans Les bricoleurs
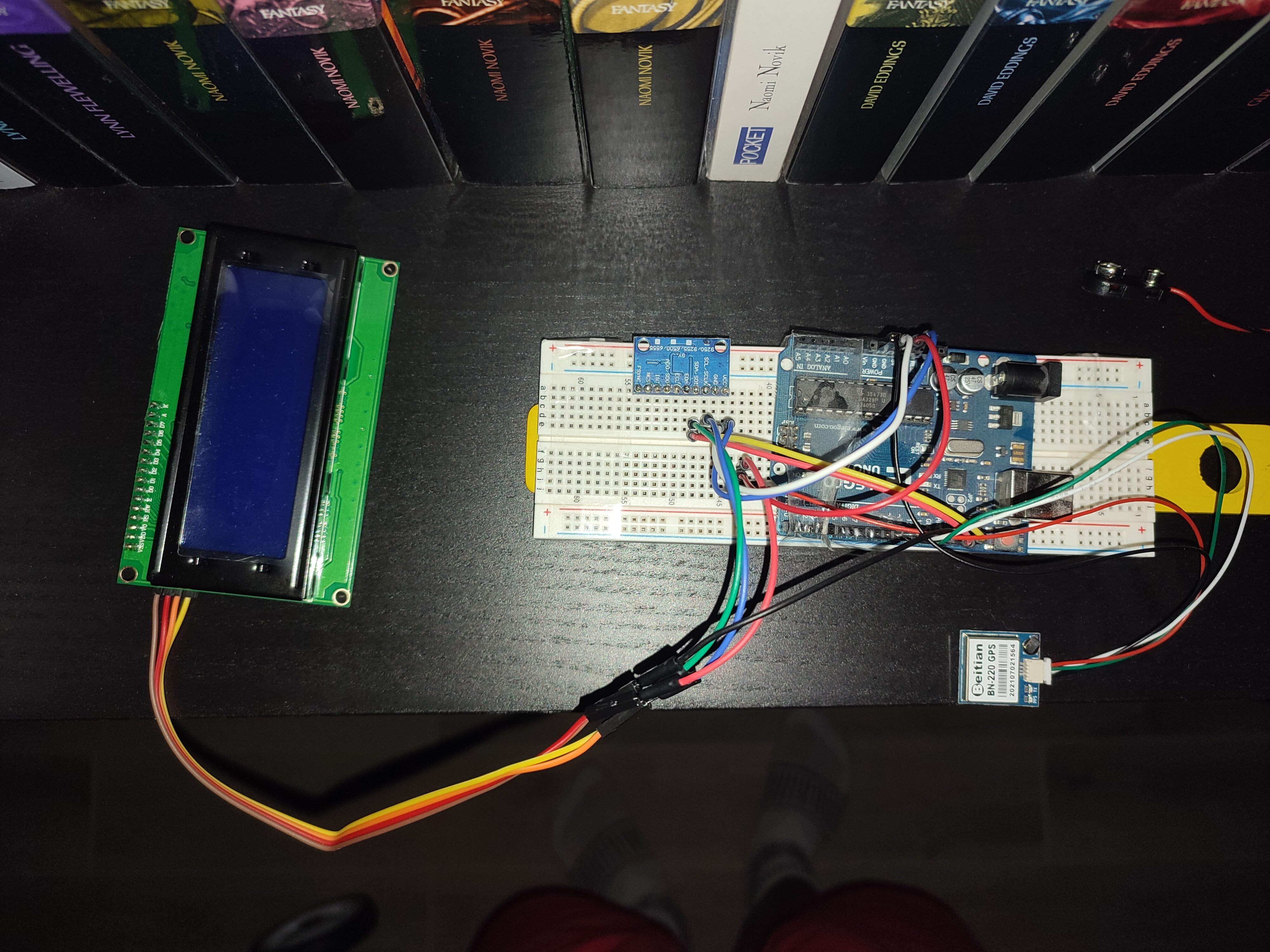
Et voici le montage final, tout est soudé sur un shield Arduino et fonctionnel. J'ai trouvé des piles 9v lipo, une pile tiens plus de 4h pour l'instant. Plus qu'à concevoir la boîte 👍 ce sera pour septembre.
-
Importance du rapport de focale (f/d)
foudezic63 a répondu à un sujet de gRRosminet dans Support débutants
l'encombrement d'un dobson, c'est le diamètre de la base et la hauteur du tube pointé vers le ciel. J'ai un 300/1500, et franchement ça passe (bien sûr ça dépend de ton logement !) Je n'y connais rien en mak, ça donne quoi en ciel profond ? il faudrait pas prendre un télescope trop spécialisé alors que tu n'as peut être pas trop idée de ce que tu vas préférer observer toi même 🙂 -
Star Pointer, où comment pointer sans moteur :)
foudezic63 a répondu à un sujet de foudezic63 dans Les bricoleurs
haha, ça ne m'embête pas, j'adore faire ça 😉 je partage juste si quelqu'un veut tenter de faire pareil, j'ai aucune intention de distribuer 😁 -
Star Pointer, où comment pointer sans moteur :)
foudezic63 a répondu à un sujet de foudezic63 dans Les bricoleurs
j'ai lu, merci beaucoup 🙂 alors oui je confirme, la filtre madgwick aide énormément, d'ailleurs à l'allumage il me faut 20 sec pour que la mesure d'azimuth converge vers une valeur stable ! j'ai bon espoir que ça suffise, mais effectivement calculer l'azimuth sur la seule base du magnétomètre c'est casse gueule 😅 La calibration que j'ai implémentée est une correction ellipsoïde, par contre je l'ai faite une fois il y a un an et demi, et j'ai repris le projet il y a 15 jours : j'ai refait la calibration pour le plaisir mais ce n'était pas nécessaire. Elle était relativement stable. C'était moins vrai pour l'IMU, mais vu le montage breadboard je serai pas surpris que la position de la carte ait changée, cqfd. Dans le cas où ça ne suffirait pas, je compte utiliser la loi des grands nombres 😅 L'algorithme de madgwick est un algorithme dit de fusion de données. La théorie dit, en 3 mots, que plus on a de capteur, plus la solution sera précise. Dit autrement, j'ai un imu sans magneto qui traîne, je pourrais tester un montage avec deux imu voir si la théorie se vérifie ! En tout cas la philosophie est la même que celle que tu décris : ça ressemble à un push to. Mais je me satisferai d'une précision relative, l'idée étant pour moi de continuer à chercher, mais de savoir si je suis dans les choux ou pas 😁 -
Star Pointer, où comment pointer sans moteur :)
foudezic63 a répondu à un sujet de foudezic63 dans Les bricoleurs
hello, J'utilise un mpu 9250. Pour l'instant je n'ai fait que des essais d'orientation avec une boussole (physique, pas de portable, d'une application à l'autre j'ai pas de répétabilité avec mon smartphone...), et globalement j'ai moins un degré de variation, mais vu le montage sur la breadboard je pense que ca ira mieux dans le montage final.🙂 Après niveau algorithme, j'utilise un filtre de kalman (madgwick algorithme), pour améliorer la précision à l'aide de l'imu. J'envisage aussi une procédure d'initialisation avec allumage au nord, mais ça je verrai quand le tout sera sur le télescope, ce sera le moment de vérité 🤣 J'ai reçu le shield Arduino aujourd'hui, je vais faire les soudures dans la semaine prochaine, puis je ferai sûrement un gabarit en carton pour tester la première fois, courant septembre sûrement. -
Bonjour à tous Un petit moment que je ne suis pas passé par ici. 3 ans que j'ai mon télescope, et depuis le début je me suis dit que créer une soirée automatiquement, ça aurait de la gueule Je m'imaginais donner une cible, et un algo me ferait parcourir le ciel pour la rejoindre, sans prendre le chemin le plus court, mais le plus intéressant. Pour faire ça, il me fallait une première étape : savoir où pointe mon télescope, sachant que c'est un dobson 300mm non motorisé. Voici donc la genèse de star pointer : Un IMU, un GPS, un arduino, et c'est parti pour mesurer l'ascension droite et la déclinaison ! Résultats pour l'instant vérifiés par simulation, en comparaison avec Astropy : ça marche ! Bon mon arduino est déjà plein à 99% avec juste cette fonction, donc le jeu, faudra penser à une autre manière de le faire (2 arduinos, ou tout sur raspberry, don't know yet). Je n'ai pas encore testé en condition réelles, pour ça il me faut encore rendre le montage plus pérenne qu'à l'heure actuelle, puis le mettre dans une boîte. Le coût actuel du projet, hum je dois en être à 70€ (un arduino, un imu MPU 9250, un gps BN-220, un écran LCD I2C 20x04, un shield arduino). Les next steps du projet : - passer de la breadboard au shield arduino (en gros du fil dupont au câble soudé !) - faire un modèle 3D du boîter, qui aura quelques fonctions telles que séparer l'IMU du reste le plus possible - faire imprimer ce modèle - recalibrer l'IMU dans ce boîtier, à proximité du télescope Et feu ! Le code (qui ne devrait plus trop bouger) est disponible ici : rdecat/star_pointer (github.com) Si ça vous dit, je vous donnerai des nouvelles au fur et à mesure de l'avancement