Lumotori
-
Compteur de contenus
6 -
Inscription
-
Dernière visite
Lumotori's Achievements
-
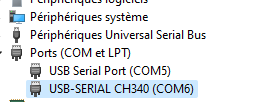
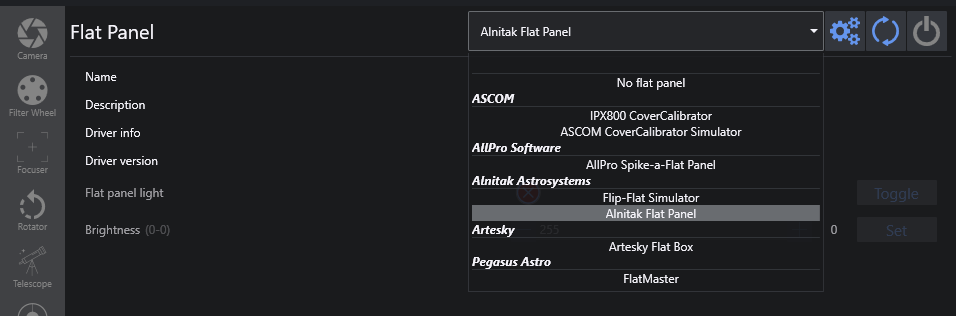
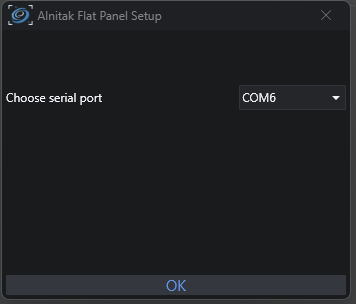
Bonjour @BenClark Pour commencer il faut contrôler que l'Arduino est visible dans le gestionnaire de périphérique de Windows : S'il ne l'est pas, il faut installer le driver correspondant, ou revenir à la version de 2014 qui fonctionne mieux sous Windows 11. Voici un forum qui en parle : https://forum.arduino.cc/t/windows-11-arduino-ide-version-2-1-1-com-port-problem/1148176/3 Les drivers sont disponibles ici : https://learn.sparkfun.com/tutorials/how-to-install-ch340-drivers/all#drivers-if-you-need-them Si tout est OK de ce côté, il suffit, dans NINA, de sélectionner Alnitak Flat Panel dans la liste : Puis de le paramétrer avec le port COM correspondant à celui indiqué dans le gestionnaire de périphérique : Cela devrait fonctionner normalement Bonne soirée, Sébastien

-
Pareil ici, l'abri est automatisé et ça fonctionne plutôt pas mal. Je viens de faire une toute petite correction dans le firmware pour que la connexion reste suffisamment stable. ASCOM c'est pas fou comme protocol au final... Capture_video_du_09-12-2023_131124.webm FlipflatProtoThread4Nina.ino
-
Bonsoir, La version précédente n'était pas très stable non plus, du fait de l'utilisation de fonctions synchrones (delay). Je viens de revoir tout le code pour le passer en protothreads, qui permettent de désynchroniser les échanges avec NINA sur le port série, et l'envoi de commandes au moteur servo. Bref, après pas mal de recherches et de mise au point, c'est beaucoup plus stable et tout à l'air de fonctionner correctement. Have fun ! Seb FlipflatProtoThread4Nina.ino
-
 Lumotori a modifié sa photo de profil
Lumotori a modifié sa photo de profil -
Bonsoir, Voici une dernière version de ce firmware, revu,e corrigée et testée grandeur nature sur plusieurs FlipFlat connectés à Nina, avec des servos 180° et 270°. N'hésitez pas à le tester, et à m'envoyer vos retours. Ce firmware est assez configurable, en utilisant les variables situées au début. Vous pouvez donc aisément l'adapter à votre usage. Pour la licence GPL, je n'ai pas eu le temps de regarder, mais c'est cadeau. Bonne soirée, Seb FlipflatAlnitak4Nina.ino
-
Merci beaucoup pour ta réponse, Bon, cette version n'est pas tout à fait stabilisée, surtout avec un servo de 270°. Je reposterai une version plus stable ultérieurement . Je vais voir à mettre à jour l'entête, après pour la licence, j'avoue ne pas avoir regarder car je n'y connais pas grand chose. Il m'importait surtout de faire fonctionner le système avec Nina ;). Bonne journée, Seb
-
Bonjour à tous, Le firmware Arduino ne fonctionnait pas très bien avec NINA (timeouts) lorsqu'on cherchait à faire ralentir la vitesse de rotation du servo, pour éviter de "claquer" le capot sur la lunette. On perdait l'info sur l'état du capot et des erreurs de timeout apparaissaient régulièrement. J'ai donc entièrement repris le code, et désormais le statut est correct, il n'y a plus de timeout (liés au SDK de NINA) et la vitesse de rotation ralentit lorsqu'on approche des limites du servo. Voici le code en pièce jointe, n'hésitez pas à faire vos retours si besoin Bonne journée, Seb FlipflatAlnitak4Nina.ino