djalex1664
-
Compteur de contenus
89 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par djalex1664
-
Reportage sur un changement radical (histoire longue)
djalex1664 a répondu à un sujet de djalex1664 dans Astrophotographie
je demanderais à la modération quelle est la meilleure solution. je pense qu'il faudrait créer un fil expres pour ça -
norma maintenant tu as 2 solutions differentes pour ton usage, j'espère que tu pourras faire ce que tu souhaites 😉
-
Reportage sur un changement radical (histoire longue)
djalex1664 a répondu à un sujet de djalex1664 dans Astrophotographie
discret68: effectivement le pas est gros pour la taille de la poulie, ça prend pas sur beaucoup de dents. peut être essayer de mettre deux roulements afin d'englober plus la courroie sur la poulie... regarde sur 123courroies, ils ont peut être ton bonheur ben je suis déjà à mon compte 😁. Je fait à la demande de la conception, prototypes, unitaire ou destinés à l'industrialisation. J'ai tout ce qu'il faut en machines et je peut répondre aux demandes si besoin. Il faudrait peut être que je propose mes services sur webastro si ça peut aider du monde. Quand j'avais amené un petit tour à métaux sur une starparty, j'avais passé 4 jours à faire des bagues, retouches, filetages etc... -
Reportage sur un changement radical (histoire longue)
djalex1664 a répondu à un sujet de djalex1664 dans Astrophotographie
il est évident que c'est juste pour du proto, cela ne peut être une solution pérenne. Pour la durée de vie à l'usure, dans le cas d'un focuser, il n'y pas beaucoup de contraintes de charge ni de déplacements. Le TPU que j'utilise est en a95 en dureté shore. Cela s'apparente à un caoutchouc un peu dur. C'est un polyuréthane comme sur une bonne partie des courroies. Le seul manque est bien les renforts fibre qui sont enroulés à l'intérieur de la matière des courroies du commerce. Ce manque va influencer son étirement sous charge et probablement un étirement général dans le temps. En imprimant les poulies et courroies, ça permet de tester plusieurs configurations très rapidement et à un coût négligeable. j'ai déjà imprimé 3 support de moteurs, 6 poulies et deux courroies. Comme je l'ai indiqué, le focuser sera refait une fois tout au point. Poulies et support alu et courroie du commerce -
d'apres ce que j'ai compris il veut que ça fasse un déplacement d'une valeur donnée à chaque appui sur un bouton. Cette valeur de déplacement peut être modifiée grâce à un potard. En gros chaque fois qu'on appui sur le bouton ça bouge toujours de la même distance.
-
voici un bout de code vite fait devant la TV pas testé /* début de programme pour le controle du focuser de norma */ #include <AccelStepper.h> //liste des paramètres modifiables const int step_mm = 200; // a changer pour correspondre au focuser, nombre de pulses par mm const int inc_min = 10; // quel sera le nombre de micron à faire en position mini du potentiometre const int inc_max = 1000; // quel sera le nombre de micron à faire en position maxi du potentiometre const int vitesse = 200; // nombre de pulsations par secondes //liste des pins #define step_pin 2 //pin step sur le driver #define dir_pin 3 //pin dir sur le driver #define enable_pin 4 //pin enable sur le driver #define moins_pin 5 #define plus_pin 6 #define potard_pin A0 //liste des variables bool appui_moins = false; bool appui_plus = false; bool sens_moteur = false; int step_a_faire = 0; // initialisation de la librairie AccelStepper Stepper(step_mm, step_pin, dir_pin); void setup() { //déclaration des ES pinMode(step_pin, OUTPUT); pinMode(dir_pin, OUTPUT); pinMode(enable_pin, OUTPUT); pinMode(moins_pin, INPUT); pinMode(plus_pin, INPUT); pinMode(potard_pin, INPUT); //définition de vitesse du moteur Stepper.setMaxSpeed(vitesse); } void loop() { //on lit si valeurs des boutons, si il y a un changement on passe au sous programme if (digitalRead(plus_pin) && appui_plus == false&& appui_moins == false) { appui_plus = true; deplacement_moteur(); } if (digitalRead(moins_pin) && appui_moins == false&& appui_plus == false) { appui_moins = true; deplacement_moteur(); } //on réinitialise les memoire des boutons quand ils sont relachés if (!digitalRead(plus_pin)) appui_plus = false; if (!digitalRead(moins_pin)) appui_moins = false; } void deplacement_moteur() { //on lit la valeur du potentiometre step_a_faire = analogRead(potard_pin); //on conditionne la valeur de deplacement suivant les parametres mini maxi step_a_faire = map(step_a_faire, 0, 1023, inc_min, inc_max); //on défini le sens inverse if (appui_moins == true) { step_a_faire = -step_a_faire; } //on lance un deplacement en boucle jusqu'à ce que l'on soit arrivé à la position voulue Stepper.setCurrentPosition(0); while (Stepper.currentPosition() != step_a_faire) { Stepper.setSpeed(vitesse); Stepper.runSpeed(); } //on fait une pause de 0.5sec delay(500); }
-
c'est ce genre là mais il y a deux moteurs. Par contre j'avais pas payé ce prix... ca a doublé Pour la précision et le décalage, c'est à cause de ça que j'étais passé à l'autoguidage avec une webcam modifiée. Quand tu dis que c'est limite, en fait c'est toute la monture qui est limite, le trépied, les moteurs...c'est bien pour ça que j'ai dis que j'avais ça plus pour le challenge que pour l'argent. Rien ne doit être laissé au hasard. Viseur polaire nickel, mise en station au top, équilibrage etc.. La question de départ est si une eq3.2 est capable de faire de la photo correcte, la réponse est oui. Cependant, à défaut de pouvoir mettre de l'argent dans une monture de gros calibre, il faudra investir beaucoup de temps, de réflexion et de bidouille. C'est, uniquement pour moi, beaucoup plus enrichissant intellectuellement. Si tu veux une eq3.2 réglée, avec les moteurs et capable d'être gérée pour l'autoguidage, je te propose la mienne. Ca te fait toujours ça de moins à faire pour rentrer dans l'astrophoto. Je sais pas si j'ai le droit de donner un prix sur le fil mais se sera vraiment peu
-
pour avoir fait pendant 10 ans de l'astrophoto avec l'eq3.2, ca marche. il faut pas de vent, pas trop charger et ne pas hesiter à mettre les mains dedans. j'ai acheter un kit motorisation tout simple avec une raquette. Démonter et roder les roue et vis sans fin. Régler tous les jeux. J'ai fait de l'autoguidage en bricolant une interface qui agi directement sur les boutons de la raquette, un port ST4 en quelque sorte. les jours sans vents et quand tout marchait, j'arrivai à faire des poses de 10mn avec un 350d défiltré, une ed80 et une petite lunette guide. Au final s'était surtout l'amusement de tout faire soit meme avec un petit budget qui m'interressait. Si tu veux t'amuser avec je peut te la vendre à pas cher, je m'en sert plus. Il te faudra par contre faire une interface car celle que j'avais fait fonctionnait sur le port parallele... deux exemples pris mon eq3.2 avec soit ED80 pour omega, soit le 150/750 pour M42

-
Reportage sur un changement radical (histoire longue)
djalex1664 a répondu à un sujet de djalex1664 dans Astrophotographie
disons que pour éviter les réflexions internes, j'ai fait un filetage. Vu que le tour était réglé pour un pas de 0.75, j'ai fait un filetage pour mettre un filtre... aussi simple que ça -
As tu déjà programmé une arduino? pour le programme de l'arduino je verrais les choses comme cela: deux boutons pour + et - un potentiometre pour indiquer le déplacement voulu donc trois entrées dont 1 analogique parametres réglables du programme: -pulses/µ -valeur mini et maxi de deplacement tu tourne en boucle tant que nu n'as pas de boutons appuyé. quand tu appuye sur le bouton +, tu lit la valeur du potentiometre en la bornant au mini et maxi, activation de l'entrée enable du driver, tu demande d'aller à la position actuelle + la valeur du potentiometre et après tu désactive le driver. la librairie stepper est toute indiquée pour ça. Commence par creer et bidouiller un programme. Si tu cherche une solution déjà faite, ça va être dur à trouver. l'intérêt du fait maison c'est d'apprendre et de faire quelque chose qui correspond exactement et ce dont tu as besoin. Si quelqu'un te fait le programme, tu ne pourras pas le modifier ou l'ajuster suivant tes besoins de manière facile. Au vu de la simplicité de ce que tu veux faire, il est vraiment valable que tu te penche sur la programmation. Ca ne te prendra pas beaucoup de temps, même si tu part absolument de zéro.
-
Pour te donner un programme arduino il faut plusieurs données avant. déplacer de 24micron c'est un soucis mécanique ça on est d'accord. le truc c'est comment les envoyer. Tu veux passer par une arduino, très bien ça marche nickel pour ça. Par contre, quand ces déplacement doivent être effectués? via des boutons? Tu veux commander à distance? Par PC? par communication série? RJ45? Ensuite pour la compensation de température, le pilote que je t'ai indiqué le gère sans problèmes. Utilisation d'un DS18B20 pour le capteur. Le pilote envoie les commandes à l'arduino pour qu'il fasse le déplacement en rapport à la température. Ou alors tu veux juste un système autonome qui te conserve ta mise au point manuelle que tu a faite, et ce même si la température change. Dans ce cas, rien de bien compliqué. Il faut mesurer la modification de ta focalisation sur 10° C(10x plus precis que sur 1°C). Sur l'arduino, on prend une mesure de température à l'allumage, et quand ça varie de X degrés, tu envoie un nombre de pulsations correspondant au déplacement souhaité. Une fois le déplacement fait, on désactive le moteur pour conservé la mise au point manuelle possible.
-
si tu multiplie la focale, tu augmente la tolérance de mise au point. Pour connaitre à combien ça correspond sur la demultiplication, il faut mesurer l'avancée pour 1 tour de la molette à 1/10. De là on en déduit l'angle critique de mise au point. Tu peut tout à fait commander un focuser via un moteur pas à pas comme celui que j'ai fait. Je te déconseille fortement d'utiliser dans ce cas la démultiplication si c'est un réducteur à billes. Ce genre de réducteur utilise des billes en contact par adhérence. Bien réglé il n'y a pas de jeu mais il y a du glissement interne. Donc tu va avoir des différences de positionnement. Pour obtenir une focalisation motorisée, j'ai utilisé un petit moteur pas à pas avec réducteur, un driver genre A4988 ou DR8825 et une arduino avec un programme ascom (myfocuserpro2 par ex) entrainement par courroie sur la molette et pis voilà
-
Reportage sur un changement radical (histoire longue)
djalex1664 a répondu à un sujet de djalex1664 dans Astrophotographie
le seul filtre que j'utilise est un UHC et c'est rare. pas génant pour le guidage. j'ai un ciel relativement bon chez moi et je ne fait pas de bande etroite. Au pire j'ai prévu un filetage à l'intérieur coté capteur. il faut dévisser les 3 vis de serrage du bloc -
Reportage sur un changement radical (histoire longue)
un sujet a posté djalex1664 dans Astrophotographie
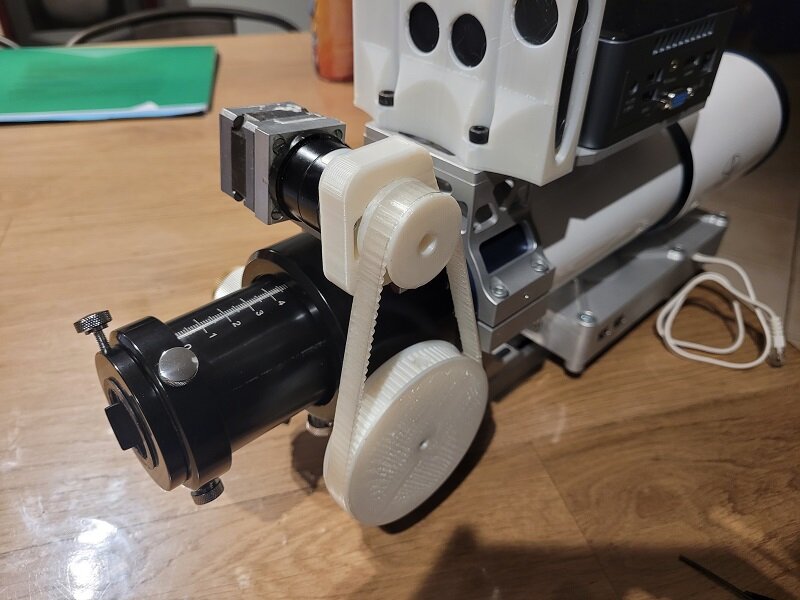
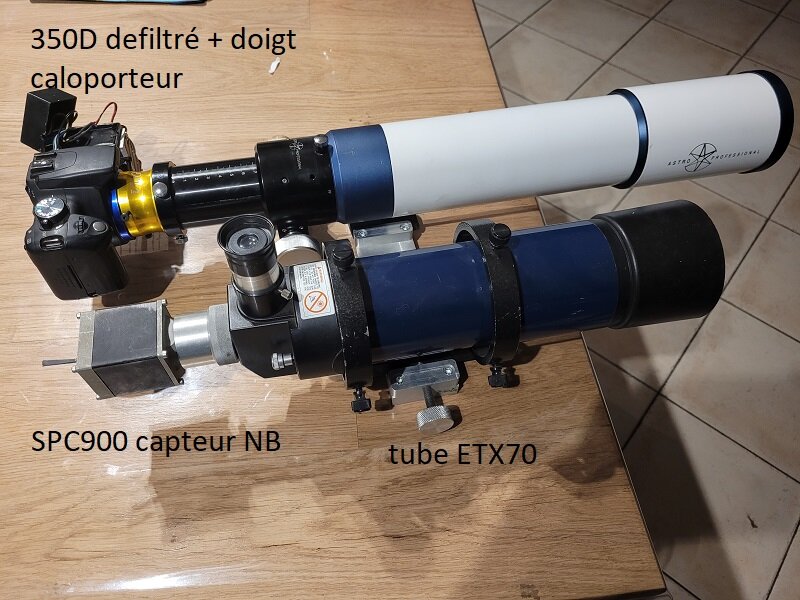
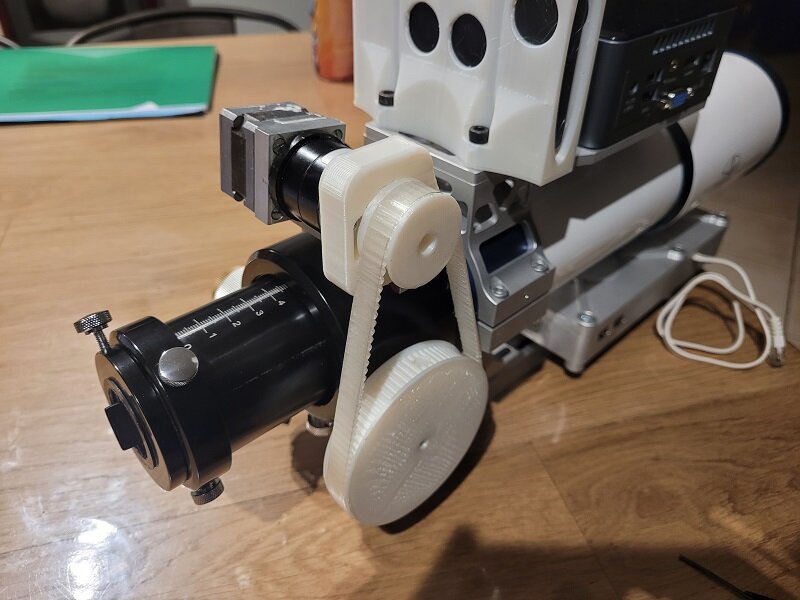
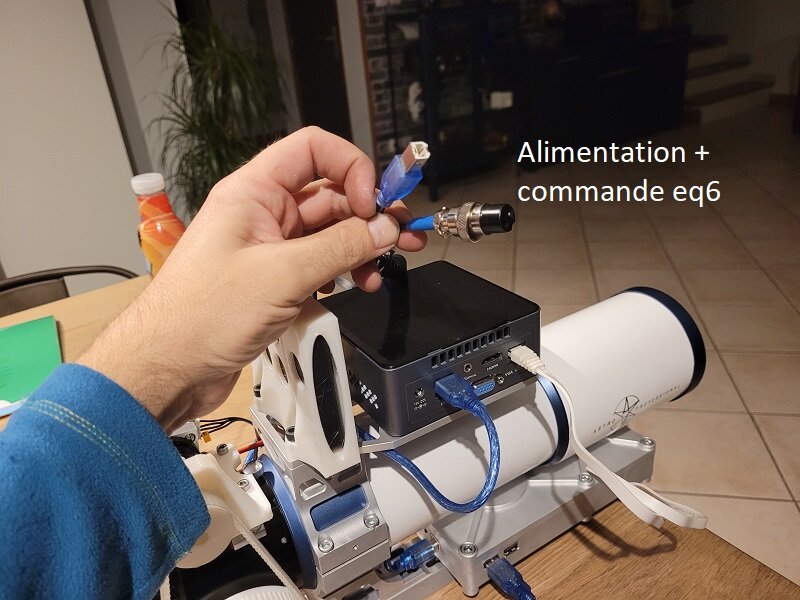
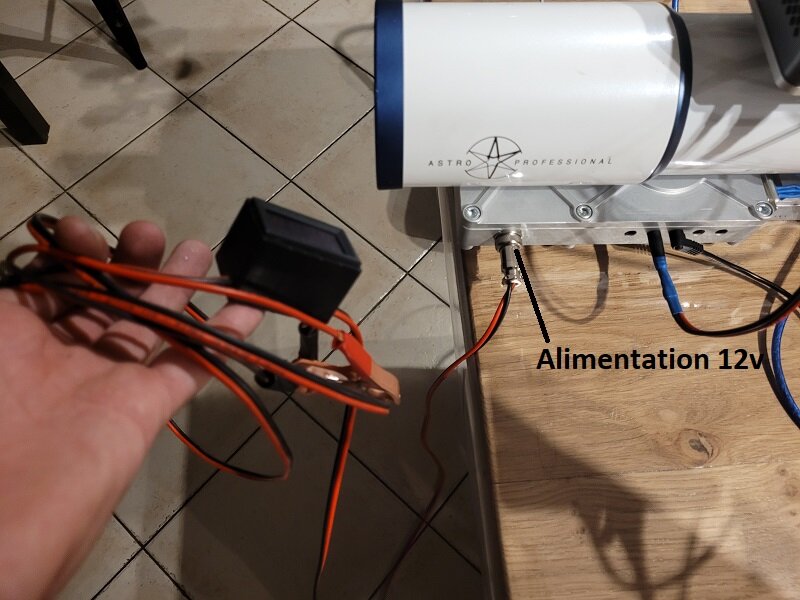
Bonjour à vous. Je post ici quelques photos de la (très)grosse mise à jour demon système de prise de vue. Avant cela il faut quelques explications sur le cheminement. Je suis un grand adepte du fait maison et ce n'est même pas une histoire d'économie. J'aime apprendre et comprendre. Je part de mon setup qui date de 10ans: eq3.2 modifiée avec auto guidage, lunette 80ed, lunette guide prise de mon etx70, spc900 modifié NB et 350D defiltré avec doigt caloporteur pour évacuer les calories du capteur. Tout ça sur un vieux pc sous xp sur lequel j'ai viré l'eclairage blanc pour le remplacer par une bande de led rouge. Résultats pouvant être très bon avec des poses de 10mn (des astram aux RAPS en sont témoins) comme ça peut déconner carrément. Evidemment, très sensible aux vent, vibrations etc... J'ai poussé ce que je pouvais faire avec ce matériel au max de ce qui est humainement possible. Après deux ans de pause, je ressort le matériel pour une starparty (RAP toujours) et là rien ne va, mais alors rien du tout de chez du tout. Je me décide donc à passer sur mon PC windows 7. La SPC900 ne marche pas avec... Bon ben ça s'annonce mal. Il serait peut être temps d'évoluer un peu et de commencer à se faire plaisir plus sur la photo que sur la prise de vue. J'ai pu trouver sur place quelqu'un qui me vendait une EQ6 d'ancienne génération sans guidage ni rien, juste avec une raquette manuelle. Ca commence à être sympa, pis au moins je serai tranquille pour le poids à mettre dessus. L'EQ3.2 ç'est galère pour la MAP, ça bouge pour rien. Me voilà avec un gros tracteur dans son jus. En tant que mécano, démontage complet et état des lieux: corrosion sur les cages de roulements, motorisation avec réducteurs à engrenages, pas moyen de relier ça au PC. Déjà tous les roulements vont y passer. Les réducteurs à engrenage ça dégage et je ferait un système à courroie. Pour le guidage, je fait la connaissance de l'ASCOM. Décision faite de faire une EQmod en plus. Rodage des couples roue et vis sans fin, réglage etc... tout ce qui va bien J'ai donc maintenant une monture qui tient la route et la charge. Déjà GROS voir même énorme changement par rapport à avant. Quelques tests et vraiment aucun moyen de faire marcher cette #*%! de SPC900. Bon je regarde ce qui existe. Venant de faire la connaissance de Cyril Cavadore (PRISM) , je lui demande son avis pour une petite caméra pouvant faire du guidage et du planétaire: ASI224. Après réception, je test ça. Incroyable la rapidité, la facilité, sensibilité... enfin c'est le jour et la nuit (sans mauvais jeux de mots). J'arrive à faire quelques photos sympas mais la tonne de câbles commence tout doucement à me saouler. d'autant plus que le 350D à son alim, son intervallometre et l'alim du refroidissement pelletier. Ayant été enchanté par la petite 224, je commence à me poser la question pour une caméra de prise de vue, les tarifs ayant beaucoup baisser en 10 ans. Cyril me prête une ASI294 et c'est difficilement définissable le ressenti que j'ai. C'est tout bonnement génial. Quand on galère volontairement avec des solutions alternatives pour chercher à obtenir des résultats, avoir une solution dédiée uniquement à cet usage change la vie. Le seul bémol étant que le capteur est plus petit que le 350d. Donc après discussion, recherche comparaison, mon choix se porte sur une ASI2600MC pro. C'est un bon budget mais j'ai rien dépenser depuis 10ans. autant partir sur ce que j'ai "besoin", un capteur APSC. Pendant tout ce temps, la température commence à descendre. De plus, tout ces câbles qui pendent et qu'il faut gérer je peut plus. Marre que faire de la photo devienne une contrainte. Comment je peut faire en sorte de plus se geler et ne plus avoir de fils qui traine de partout? Pour les fils, rendre le système entièrement autonome et n'avoir plus qu'un seul câble pour l'alimentation. Pour éviter de se geler, ben tout simplement rester au chaud.... Donc pouvoir prendre la main sans fil. Voilà pour la mise en place du contexte de la modification de mon setup d'astrophoto... Ce qu'il va falloir faire: -Je dégage ma lunette guide et je vais passer par un diviseur optique. -Pour l'autonomie logiciel, je tombe par hasard sur un micro pc NUC de chez intel. -Etre capable de faire un focus à distance, donc focuser ASCOM -Ajouter un router sans fil pour prendre le contrôle à distance en wifi -faire les flats et dark à distance serait bien Donc je part de ma lunette, la fixation me semble faible pour ce que je veux mettre dessus. Je vais donc usiner un collier qui sert entierement toute la partie en alu massif de la lunette. J'ajoute une réhausse ainsi qu'une platine queue d'arronde. Cet anneau servira de support pour le mini pc. Je prevois en meme temps de faire un petit support pour un futur focuser Usinage d'une platine de fixation pour le mini pc Création du boitier intégrant le contrôle de focuser, relais d'alimentation, hub usb et router wifi. Déjà présenté précédemment. une fois toute la carcasse montée Usinage du diviseur optique et ajout d'un field flatener. une cale de 0.7mm à été nécessaire pour le backfocus théorique mise en place de la carcasse, ça respire la santé Ajout d'un petit boitier imprimé 3d pour tenir le HDD externe, je ferais le traitement des photos ailleurs création d'un proto de focuser pour valider le principe. courroie en TPU imprimée maison. tout sera refait en alu quand se sera au point Système au complet autonome Deux cables pour commander la monture, donc un seul degré de rotation à gérer pour ces câbles Et un seul câble d'alimentation général Il reste plus qu'à attendre un ciel plus clément pour la première lumière...
-
TS 102 /714mm Apo Triplet, un chemin pas si tranquille...
djalex1664 a répondu à un sujet de Phil49 dans Matériel astrophotographique
Je remet ici une partie du dernier MP avec phil49: Il faut régler les problèmes dans l'ordre. Pour moi, le plus gros défaut est sur le DO, trop léger pour le poids qu'il y a derrière. en deuxième le porte filtre mais pas sûr vu la taille (à vérifier avec un comparateur). Vérifier aussi le porte oculaire et régler le jeu si besoin (pareil au comparateur). Le serrage par 3 vis te fait reprendre le poids complet sur uniquement 3 points. Etant donné que la matière n'est pas rigide (c'est pas du diamant), ça se déforme suivant la contrainte. Ca peut reprendre sa place quand cette contrainte n'a pas été assez forte pour générer une déformation supérieur à la limite élastique de la matière. Si ce poids est réparti sur une grande surface, plus de soucis (pour faire simple) Pour l'instant on ne fait que des suppositions, certes assez précises et dirigée sur le DO mais cela reste des suppositions. On doit se baser sur des faits et pour cela il faut faire des mesures avec des moyens de contrôles adaptés. Tant que l'on restera sur du "ça bouge mais jamais pareil et je sais pas d'où ça vient" on restera sur un problème insolvable de façon correcte. -
si c'est pas beaucoup maché, essaye avec une lime à filet... Sinon reprise sur un tour en faisant un outil à fileter en acier rapide
-
TS 102 /714mm Apo Triplet, un chemin pas si tranquille...
djalex1664 a répondu à un sujet de Phil49 dans Matériel astrophotographique
S'était une mise en situation d'un cas extrême qui ne peut probablement pas arriver sur ton focuser. Ca montrait juste que l'influence de la flexion focuser n'est pas énorme si il n'a pas de jeu Ne dis pas retour à la case départ, on est plusieurs du même avis, ton diviseur optique ainsi que le porte filtre on de grande chances d'être la cause de tes soucis. -
TS 102 /714mm Apo Triplet, un chemin pas si tranquille...
djalex1664 a répondu à un sujet de Phil49 dans Matériel astrophotographique
d'apres ce que m'a dit cyril cavadore avec qui je bosse pas mal (créateur de PRISM pour ceux qui connaissent pas), skyméca est très très chargé et il a du mal à tout faire. Il est donc "normal" qu'il ne réponde pas. Comme phil49 l'a indiqué, nous sommes en train de discuter en PM pour trouver la meilleur solution pour ses problèmes de rigidité. Nous pourrons faire un synthèse de tout ce que nous nous sommes dit une fois que ce sera terminé. Cela afin d'en faire profiter le plus de personnes. Pour ma part, les points rédhibitoires sont le porte filtre et le diviseur optique. De part leur conception, ils ne sont pas à même de supporter les 700grs de la caméra. Autre point qui doit être vérifié, c'est le focuser. il faut vérifier qu'il n'y a pas de jeu sur la portion utile de focus. Si il n'y a pas de jeu, pas grand chose à faire à part vérifier qu'il peut tenir le poids de l'ensemble sans induire de flexion. Utiliser une bague allonge ne modifiera pas la rigidité. Je m'explique: le focuser est capable de tenir un effort radial de X Newtons. En mettant un poids à une distance Y (la caméra + OAD ...) cela engendre un effort de torsion. Effort qui est différent suivant que l'on pointe l'horizon ou le zénith. Si on met une bague allonge pour que le focuser soit plus rentré, la distance Y est toujours la même, l'effort n'a donc pas changé. Et en plus on rajoute des défauts de parallélisme de chaque pièce. Je pense, à titre personnel, que c'est une fausse bonne idée. En faisant un calcul simple et en supposant les éléments parfaitement rigides, on considère un affaissement de 0.3mm de la caméra lorsque l'on pointe l'horizon (position engendrant le plus d'effort). Cette caméra est à 120mm du focuser (du dernier roulement exactement). Cela fait une différence 0.035mm au coin du capteur de l'asi2600 par rapport au centre. Il faudrait voir quel est sa tolérance de mise au point pour sa lunette et si cela peut impacter les résultats. -
Conception et réalisation powerbox + contrôle focuser + wifi
djalex1664 a répondu à un sujet de djalex1664 dans Matériel astrophotographique
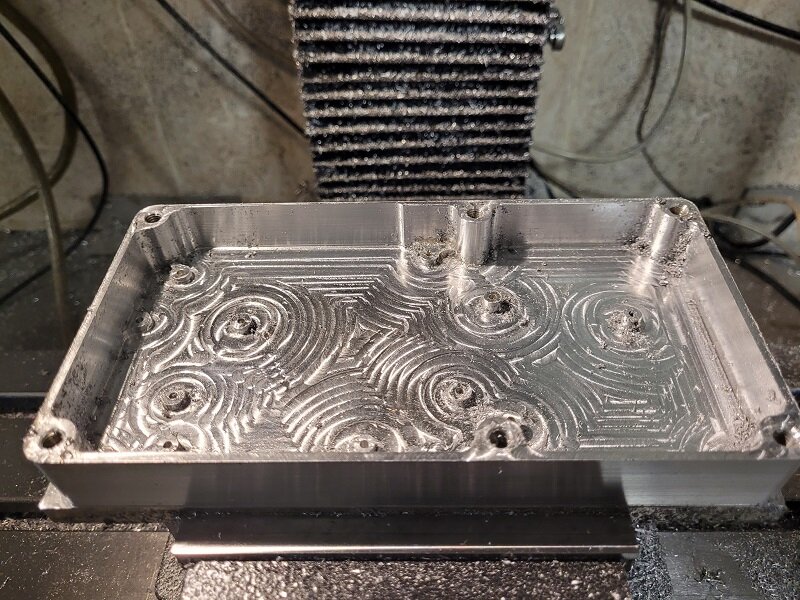
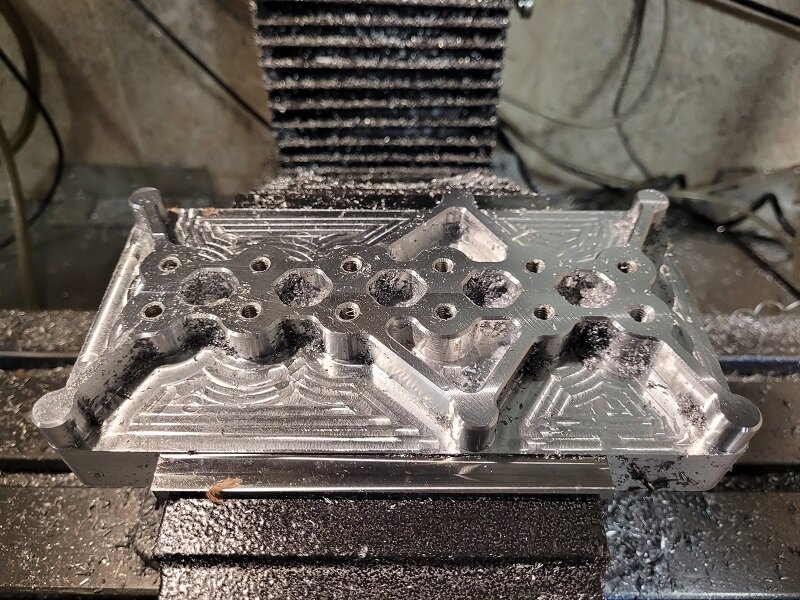
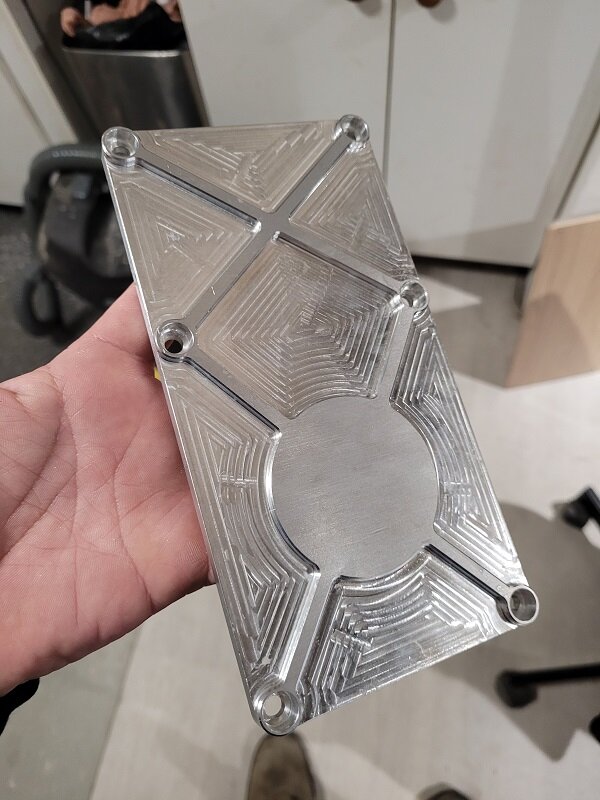
pour les drivers j'utilise aussi des 8825 et 2208. c'est juste que j'avais que ça sous la main de dispo. Pour la fraiseuse, c'est une BF30 modifiée par mes soins avec vis à billes, grattage des portées etc.. usinage avec fraise de 6mm passe de 5mm et 450mm/mn d'avance. 35 mn pour la petite et 1h20 la grosse. Il n'y a pas de cotes precise donc ça va vite. -
Conception et réalisation powerbox + contrôle focuser + wifi
djalex1664 a répondu à un sujet de djalex1664 dans Matériel astrophotographique
pour le driver de PAP, j'ai pris un 4988 tout simple que j'avais sous la main -
télescope sky watcher 130 900 ou 150 750
djalex1664 a répondu à un sujet de Christ59 dans Matériel général
j'ai commencé par un skywatcher 150/750. je l'ai toujours et je le garde bien. super lumineux pour la taille (F/D 5) utilisé sur du planétaire et du ciel profond. Je le trouve vraiment passe partout comme télescope. Super pour débuter en tout cas à mon avis. Acheté avec une monture eq3.2 avec un kit de motorisation -
Conception et réalisation powerbox + contrôle focuser + wifi
djalex1664 a répondu à un sujet de djalex1664 dans Matériel astrophotographique
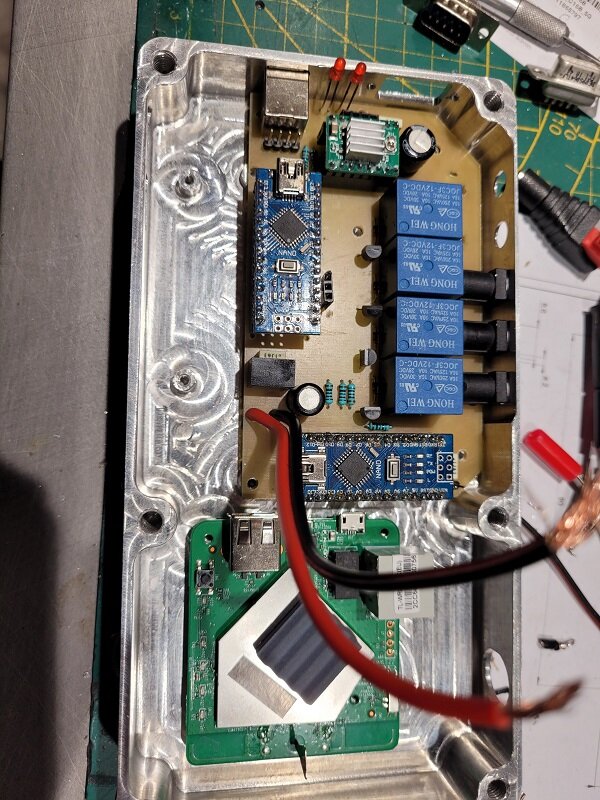
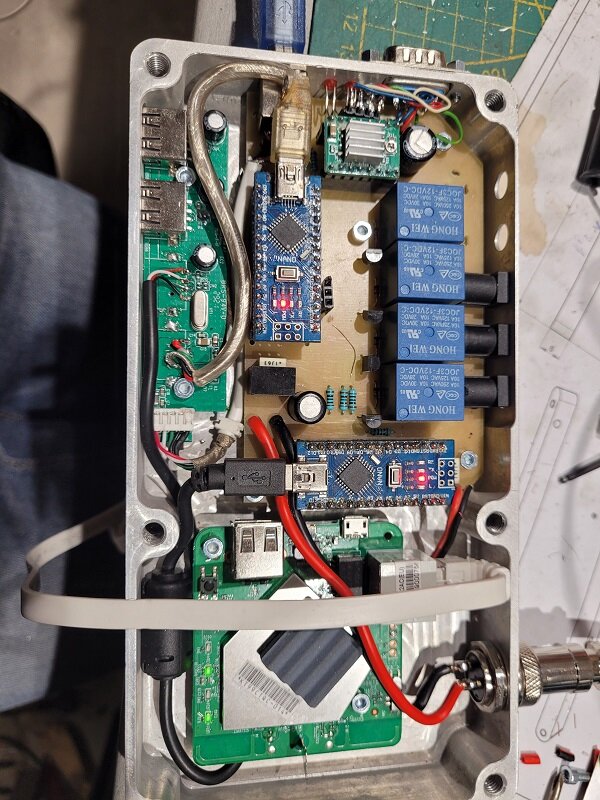
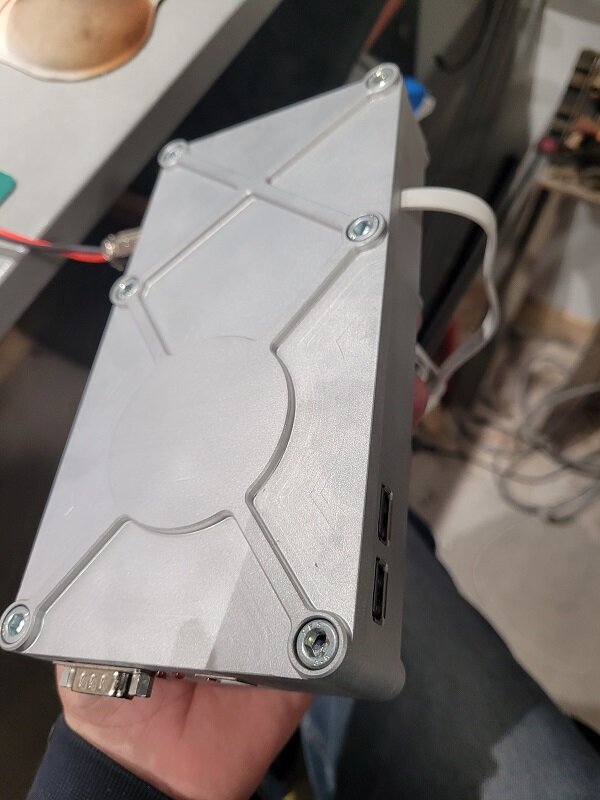
il y en a une qui gère les relais et l'autre le focuser. cela me permet d’être sur 2 ports COM différents. Cette boite permet de gérer et distribuer le jus à tous mes éléments, piloter la mise au point et créer un accès sans fil sur un micro pc solidaire de la lunette. Je peut désactiver ou activer une sortie 12v quand j'en ai besoin. Pour l'utilité finale, c'est pouvoir piloté ma lunette depuis mon canapé ou ma voiture quand il fera froid. Je compte aussi faire un système de flat pilotable mais quand tout aura été validé. Une fois que tout sera terminé, la monture portera tous les éléments nécessaire pour faire de l'astrophoto, PC compris. Je prendrais la main à distance le pc de la lunette directement sur mon pc portable dans mon canapé. Et tout ça sans fil... il y aura besoin juste d'un câble d'alimentation. Je pousserais peut être même le vice en remplaçant le contrepoids par une batterie 😁. Comme ça plus de câble du tout. La motivation de tout ce travail est une histoire de confort. Je n'ai plus envie d'avoir le portable sur une table avec 50 câbles qui traine de partout. Tout ça en se gelant les doigts et le reste. -
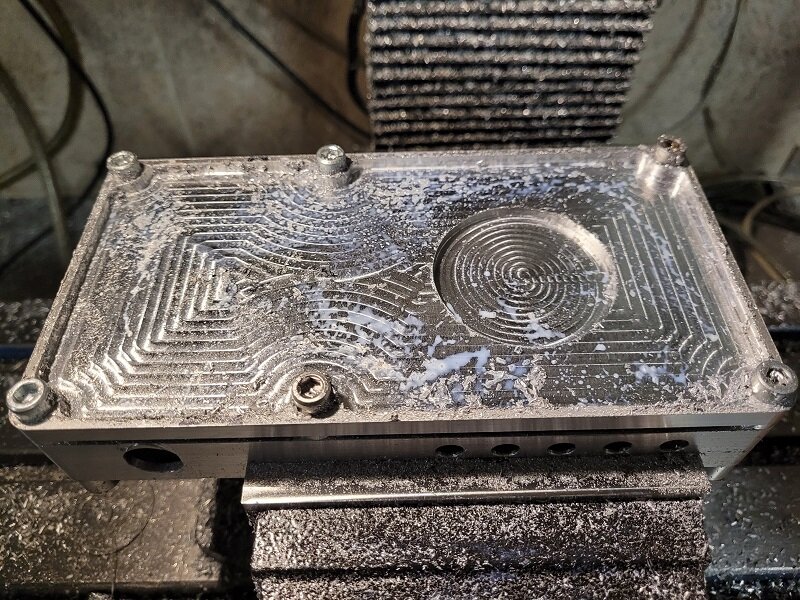
Je viens ici présenter ma petite powerbox que j'ai réalisé pour mon setup. Le cahier des charges: -contrôler un moteur pas à pas en ascom -avoir un switch wifi pour connecter mon micro PC sur la lunette -4 sorties 12v pilotables par pc -1 sortie permanente 12v pour alimenter le pc -2 port usb pour brancher ma monture en ascom (EQmod) et un éventuel appareil -avoir un boitier suffisamment rigide pour pouvoir installer des élements mécaniques supplémentaires dans un premier temps j'ai réalisé un système de focuser en partant sur des projet ascom arduino. Pas de problèmes particuliers ensuite, j'ai réalisé un système de pilotage de 4 relais par une petite application windows avec un retour d'info de la tension batterie. Une fois ces deux éléments validés, j'ai fait un circuit sur eagle incorporant les deux arduino, les relais etc... J'ai créer le boitier qui permet de tout mettre dedans en incluant un hub usb sur lequel j'ai dessoudé deux ports pour les mettre directement sur les 2 arduinos. Usinage du boitier et de la plaque de fermeture. passage en microbillage pour préparer un état de surface mat pour une anodisation future. Anodisation que je ferai lorsque j'aurais des pièces à faire pour des clients. J'ajouterais probablement deux antennes wifi par la suite pour augmenter la portée Je peut transmettre les schémas, fichiers sources qui sont à moi ou même les fichiers 3D du boitier pour ceux qui le souhaite. Pour le focuser, je peut aider en indiquant les liens des concepteurs. Lorsque tout sera monté, je ferai une présentation de mon modeste setup pour l'astrophoto Place aux photos
-
TS 102 /714mm Apo Triplet, un chemin pas si tranquille...
djalex1664 a répondu à un sujet de Phil49 dans Matériel astrophotographique
je parlais de mettre une scotch avec un repère à l'exterieur... Par contre bien vu coté intérieur aussi pour se reperer -
TS 102 /714mm Apo Triplet, un chemin pas si tranquille...
djalex1664 a répondu à un sujet de Phil49 dans Matériel astrophotographique
Je ne connais pas ses tarifs, mais 1h d'usinage coute entre 60 et 180€ de l'heure. Plus la matière, le traitement de surface, le transport etc... Pour le focuser, c'est sur que ça ne sera pas 500€... on en est pas encore à ce stade. Les tolérance d'usinage ne s'annulent jamais d'après la loi de murphy. 0,05mm pour une tolérance faible, ça fait 0,2mm sur 2 pièces (4 faces en contacts). On est déjà au double de la plage de focalisation de ta lunette. Sans compter les defauts de parallelisme des faces qui sont forcement réalisées en retournant. Pour limiter cette accumulation de défauts, il faut limiter au maximum le montage de plusieurs pièces. C'est pour cela que j'essaye de faire du monobloc. Dans ton cas, il faut faire en sorte de s'affranchir de l'inconnu de l'accumulation de tes défauts. Pour faire un état des lieux, je te propose la méthode suivante: -faire un repère sur chaque élément de ton assemblage optique avec un scotch par exemple. -faire 4 photos avec un angle de 90° à chaque fois sans toucher autre choses que ce dont tu te sert pour faire la rotation de champ. Cela donnera le défaut de parallélisme à noté dans un tableau. -Ensuite faire la même choses avec chaque élément dont la rotation est possible (diviseur, cale d’épaisseur) en ne bougeant qu'un seul élément à chaque fois. Une fois toutes ses valeurs mesurées, tu auras une valeur de défaut pour chaque élément. Cela te permettra dans en premier temps de connaitre la position de chaque élément et en déduire les positions qui te donneras le défaut le plus faible. A partir de là tu pourras commencer à régler ton tilt car tu sauras que quand tu tournes, ca n'engendre que peu de défauts pour ton tilt, j'ai peut être une solution. Il me faudrait un peu plus d'infos mais on peu faire quelque chose de costaud, durable et efficace. Pour les valeurs de correction, avec un petit fichier excel, on peut trouver l'angle de serrage à mettre sur chaque vis pour tomber juste en limitant le nombre d'essais. Contact moi en PM on regardera ce que l'on peut faire.