Pat.lqvr
-
Compteur de contenus
23 -
Inscription
-
Dernière visite
Visiteurs récents du profil
1045 visualisations du profil




Pat.lqvr's Achievements
-

Quelle barlow pour une tête binoculaire Denk II
Pat.lqvr a répondu à un sujet de Arjuna dans Matériel général
En configuration Newton, pour utiliser le glasspath 1,7 cité, l’idéal serait de visser un baïonnette Zeiss T2 (BA-2456320) directement en entrée de bino. Le powerswitch ne sera pas utilisé car il fonctionne uniquement avec les OCS Denk sur Newton. -
Quelle barlow pour une tête binoculaire Denk II
Pat.lqvr a répondu à un sujet de Arjuna dans Matériel général
Sur ta lunette, la bino est t’elle déjà utilisable? -
Quelle barlow pour une tête binoculaire Denk II
Pat.lqvr a répondu à un sujet de Arjuna dans Matériel général
Il ne vend que la lentille d’entrée, ça ne fonctionne pas ( je l’ai acheté) Arjuna a bien le powerswitch? Donc ça devrait fonctionner. -
Quelle barlow pour une tête binoculaire Denk II
Pat.lqvr a répondu à un sujet de Arjuna dans Matériel général
-
Quelle barlow pour une tête binoculaire Denk II
Pat.lqvr a répondu à un sujet de Arjuna dans Matériel général
Bonjour, Pourquoi ne pas commander directement l’OCS A45? Il est bien adapté au powerswitch et pas plus chère qu’une Barlow télécentrique. -
Bonsoir, Oui avec le doubleur ou Powermate x2, la bino nue ne passera pas de toute façon.
-
En dessous de 50mm de tirage, avec certains oculaires, la MAP ne sera peut-être pas possible.
-
Bonsoir, Le chemin optique de la BINOVUE est bien plus long que les concurrentes MarkV, MB2, Denk… Si le back focus de l’instrument est déjà juste, c’est pas la bonne solution.
-
Collimation qui change avec l'altitude du telescope ? (Flextube 16")
Pat.lqvr a répondu à un sujet de jimmystar dans Matériel général
Bonjour, Avec cette conception de 3 tubes parallèles, il y aura toujours une flexion en fonction de la position zénith et 45 degrés. Ça ne pourra pas remplacer une structure type demi serrurier qui par triangulation donne une rigidité parfaite . Cette solution du fabricant est économique mais affecte la tenue de la colim. Ce n’est pas insurmontable quand on maitrise les réglages pour refaire la colim en fonction de l’altitude de pointage. -
Bonjour, Sur mon 600 la map sur l’infini est au moins de 30mm en retrait par rapport à la map sur un objet se situant à 150 mètres. Je pense que tu n’as pas le choix de recouper les tubes serrurier. Un montage à blanc serait judicieux avant de faire un collage définitif. bon courage 😉
-
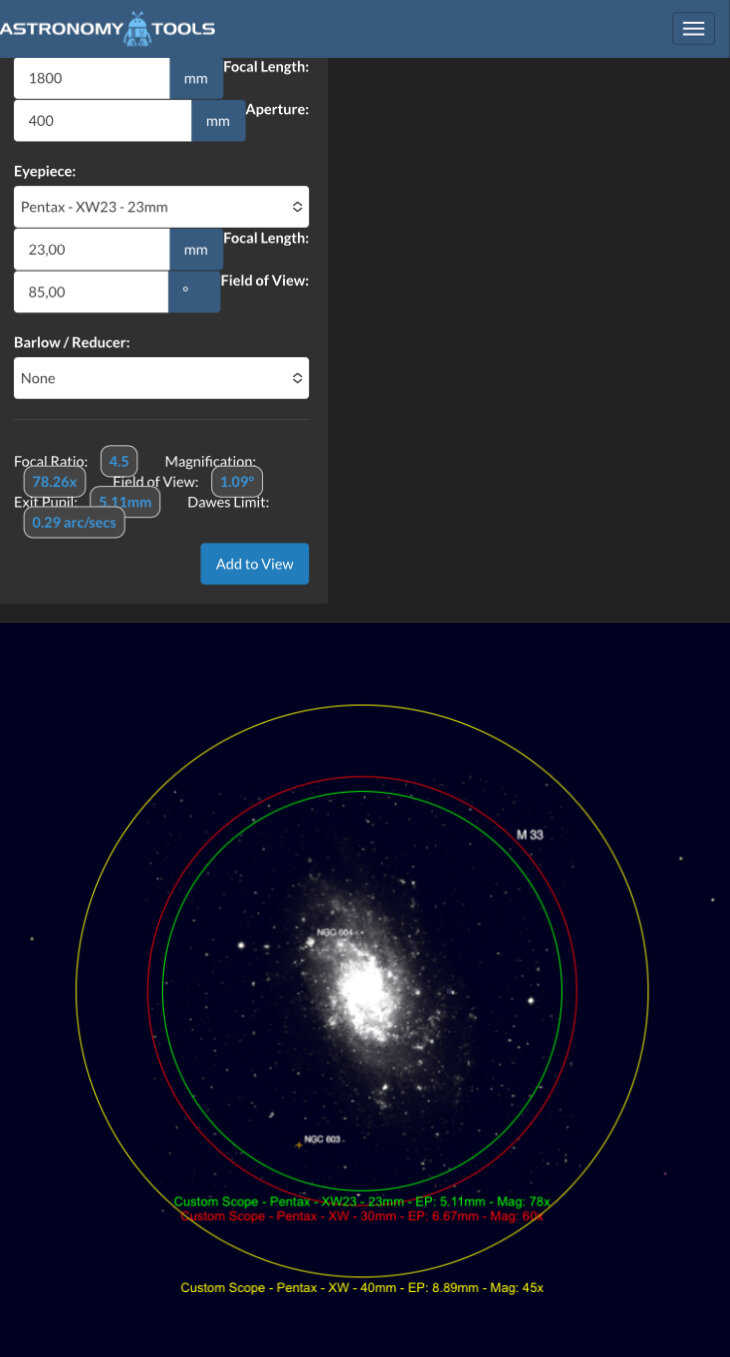
Oui le facteur de grossissement du paracorr est à pendre en compte. Tu peux le renseigner à la fin dans astronomytools . Je te conseil aussi de regarder le 2Omm Houdini qui a une correction de coma intégrée et qui rivalise avec l’Ethos de 21.
-
Bonjour, La pupille de sortie c’est le cercle lumineux produit par l’oculaire et capté par la pupille de l’observateur. En fonction de l’oculaire et de l’instrument elle varie et ne doit pas dépasser un certain diamètre (8mm c’est la maxi pour un jeune), l’âge de l’observateur est à prendre en compte puisque la pupille diminue avec le temps. Sur ton 400, le XW40 donne une PS trop grande avec presque 9mm( c’est comme si tu diaphragmais ton télescope). Le XW23 en revanche passe très bien et sur le simulateur le XW30 offre guère plus de champ.

-
Salut, J’ai comparé ce H20mm avec l’éthos de 21mm + Paracorr type2 sur le T600 f/d 3,4. Vraiment bluffant! La correction de coma est identique avec le poids en moins. Concernant la bonnette perso je la replie pour accéder à tout le champ. C’est un très bon achat 😉
-
NEXUS II + Sky Safari 6 pilotage monture wifi en dysfonctionnements
Pat.lqvr a répondu à un sujet de Pascvale13600 dans Matériel général
Hello, j’avais un soucis similaire au début de mon utilisation du Nexus DSC avec SkySafari sur mon Dobson. J’avais paramétré le wifi sur mon iPad et mon iPhone et lorsque les 2 appareils étaient à proximité le Nexus perdait le wifi par intermittence voulant se connecter sur le second. En coupant le wifi sur le second appareil je n’ai plus jamais eu le soucis. Peut-être une piste😉 -
Batterie LifePo4 et froid quel perte de puissance?
Pat.lqvr a répondu à un sujet de lviatour dans Matériel général
Bonsoir, Des solutions existent comme des enveloppes thermiques pour isoler du froid (facile à bricoler) mais aussi des coussins chauffants avec régulation intégrée. Bien sûr cette dernière solution consomme des ampères mais au final le bilan et positif sur les performances de la batterie.