Argth
-
Compteur de contenus
138 -
Inscription
-
Dernière visite
Argth's Achievements
-
Tu pourrais envoyer une photo de la pièce qui a du jeu ? Je regarderai si j’ai pareil
-
Bonjour @mimosa4, la juwei 17 est dehors en permanence, j’ai effectué une 12aine de nuits en janvier et je dois dire que la monture fait juste son travail, rien à lui reprocher : elle porte mon 254mm sans broncher. Selon les conditions météo l’autoguidage descends à 0.6 arc sec RMS, ce qui est parfait pour moi. aucun problème avec le bouton marche arrêt, peut être à chercher du côté alimentation 12v ? Sur des forums anglophones ils parlent de la graisse qui devient trop visqueuse à basse température mais je pense pas que ce soit ton pb.
-
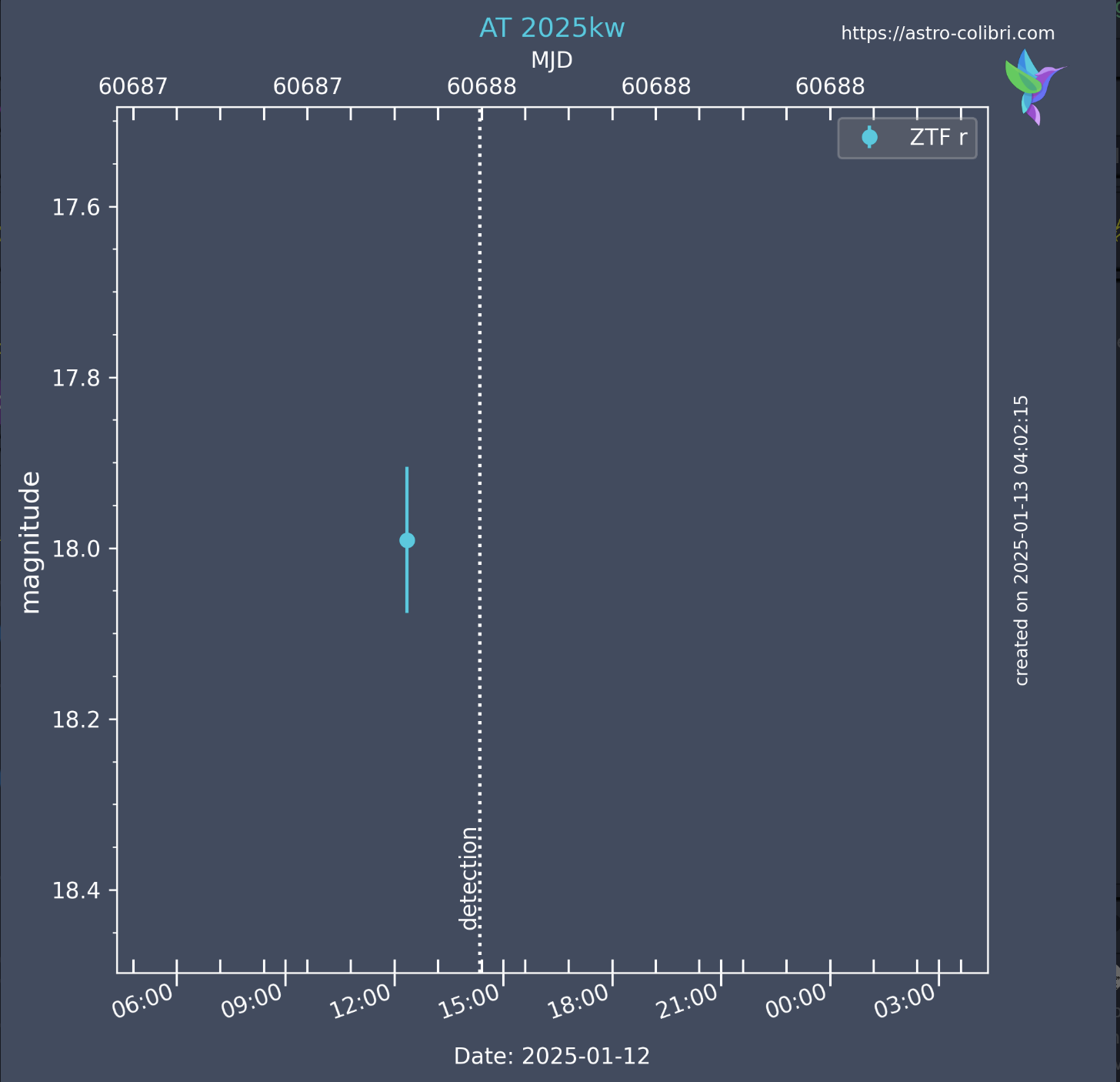
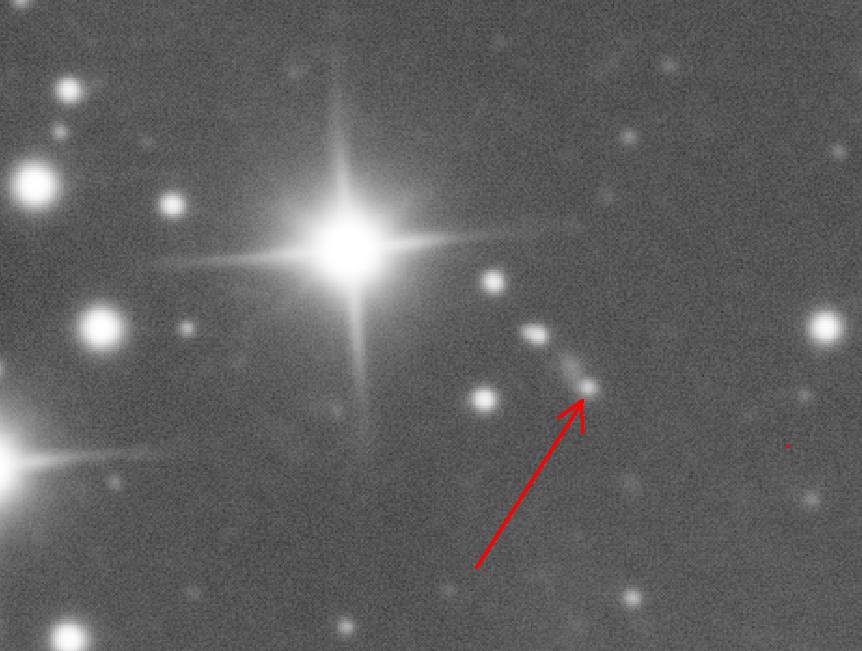
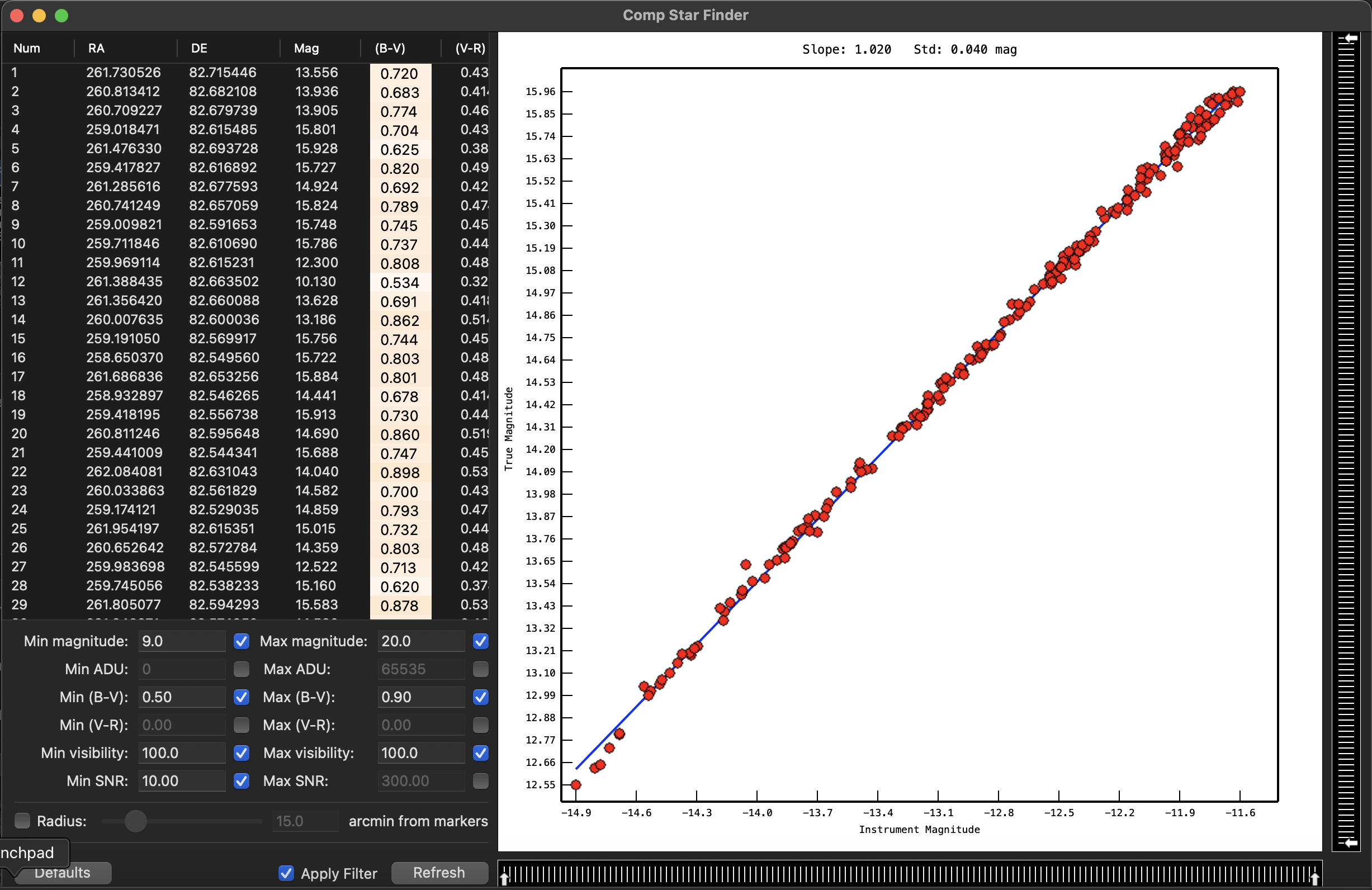
Bonjour à tous ! Un nouvel AT toujours très près de l'étoile polaire : AT 2025kw Detection par ZTF le 2025-01-12 14:21:01 Photo DSS : Et mon image (recoupée) : Linéarité de la photométrie pour les étoiles de référence : Capteur 10" à F/3 + ZWO585MC : 30x120s : Photométrie dans le canal rouge (avec catalog atlas dans le rouge aussi) : EXPOSURE JD: Mid-exposure, not corrected for light time --------------------------------------------------------------- JD mag Flt SNR ZeroPt Cat Design. --------------------------------------------------------------- 2460688.687295 17.141+/-0.06 R R 19.87 27.505 ATLAS2 0 ----- end -----

-
Ah c’est vrai que mag 17 c’est un peu petit bras 😂
-
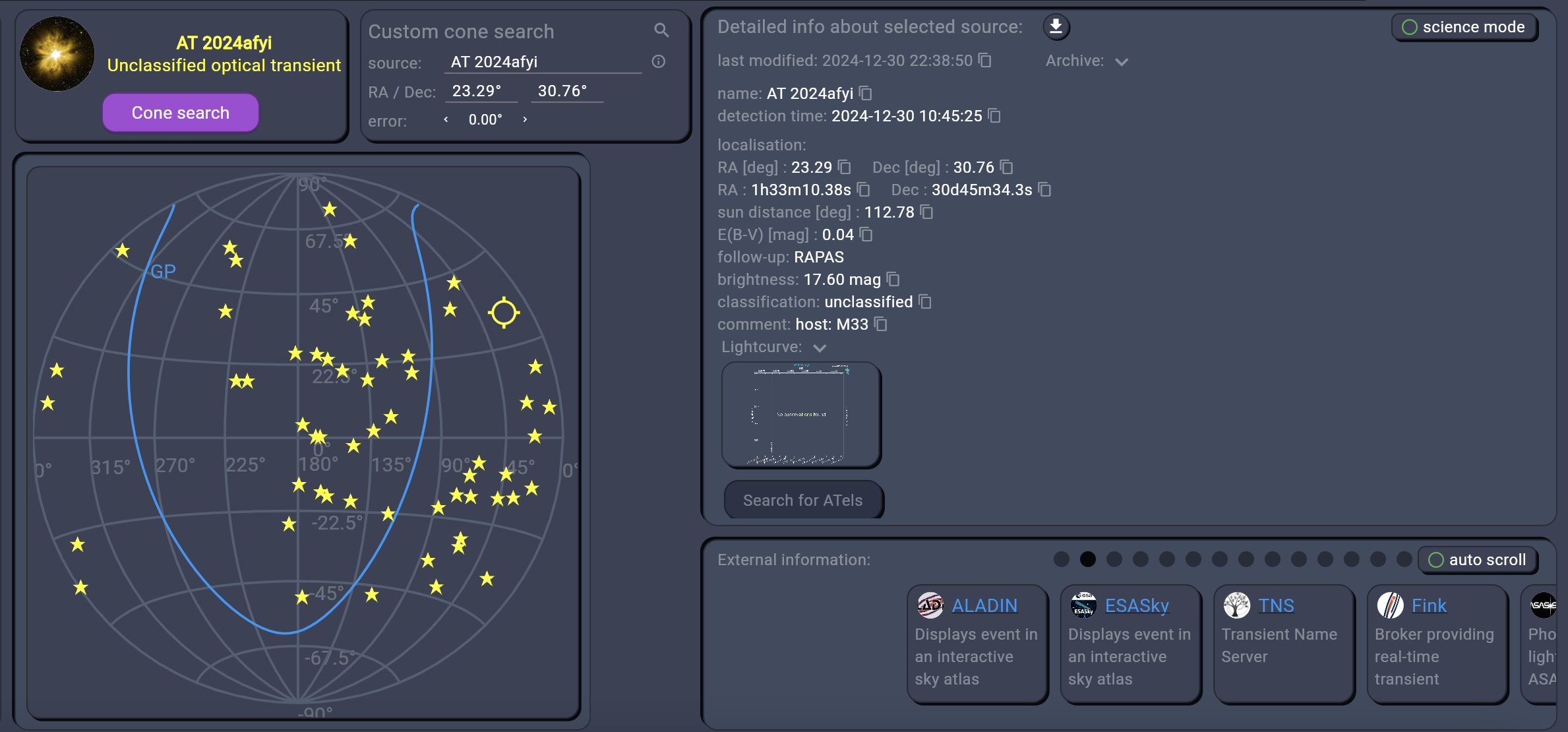
AT2024afyi (= PNV J01331038+3045343), TNS discovered 2024/12/30.448 by Koichi Itagaki Found in M33 at R.A. = 01h33m10s.380, Decl. = +30°45'34".30 Located 522".4 west and 357".5 north of the center of M33 (Discovery image) Mag 17.6:12/30, Type unknown (References: CBAT TOCP) source : https://www.physics.purdue.edu/brightsupernovae/
-
Bien vu, on attend toujours la classification !
-
Image d'une super nova un Phénomène lumineux transitoire (non classé encore) dans m33: RA : 10h42m12.5s DEC : 23d44m51.6s Magnitude mesurée (sans filtre photométrique) : 17.47 +/- 0.16 Découverte le 2024-12-29 à 12:48:36 (pas par moi :D, je regarde simplement les notifications sur https://astro-colibri.com/event:TNS2024afyi)
-

Nouveau Matériel: Monture Harmonique Ragdoll 17
Argth a répondu à un sujet de tranquiliste dans Matériel astrophotographique
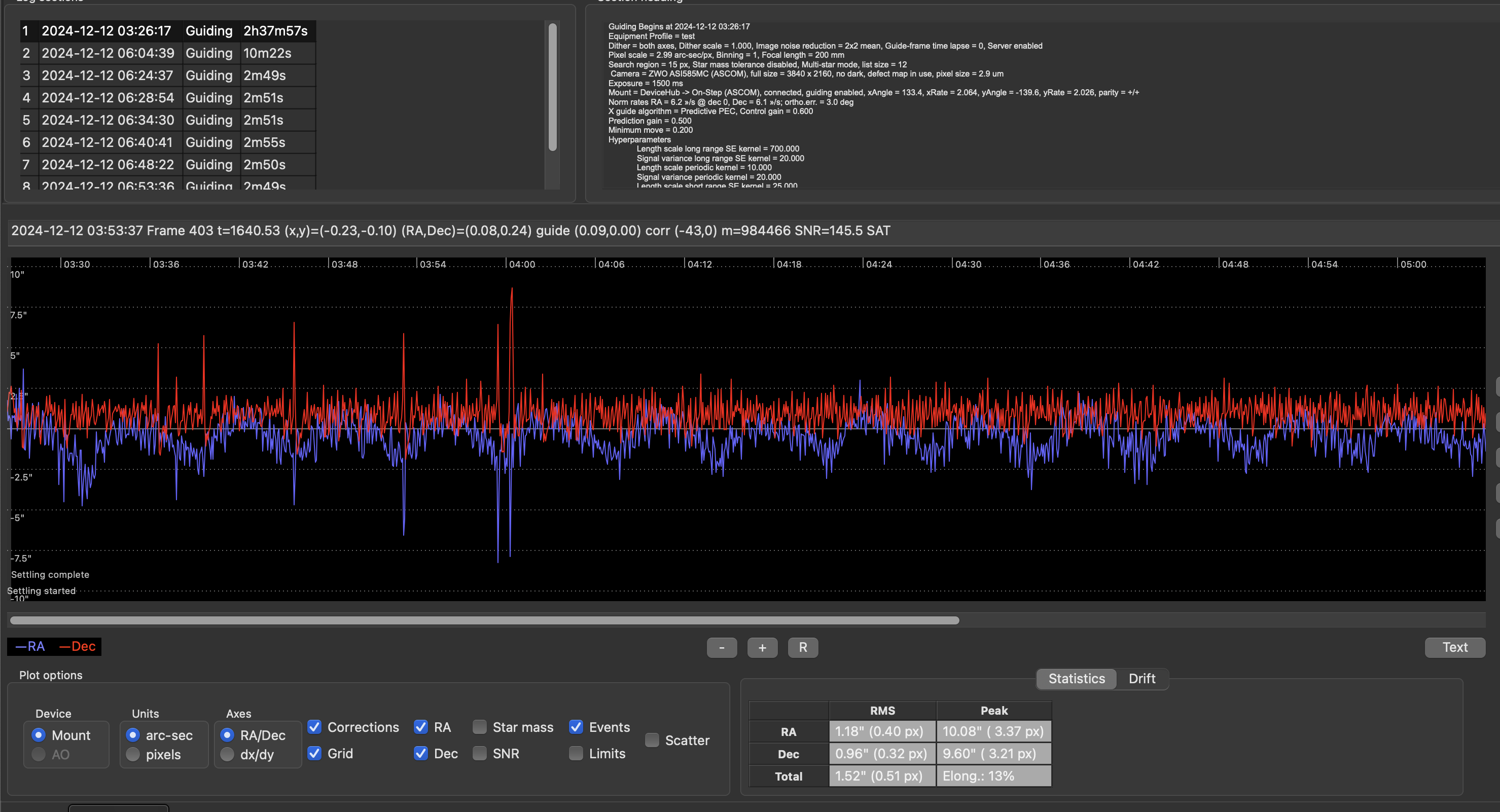
Quels étaient tes paramètres PHD2 ? merci pour ce retour super intéressant ! -
Construire un projet remote de 0 - Etape par étape
Argth a répondu à un sujet de valdetahiti dans Les bricoleurs
Salut, en regardant sur leur site il semble que l'on ne peut pas envoyer tout sont setup, ils fournissent le tube optique et la monture, correct ? -
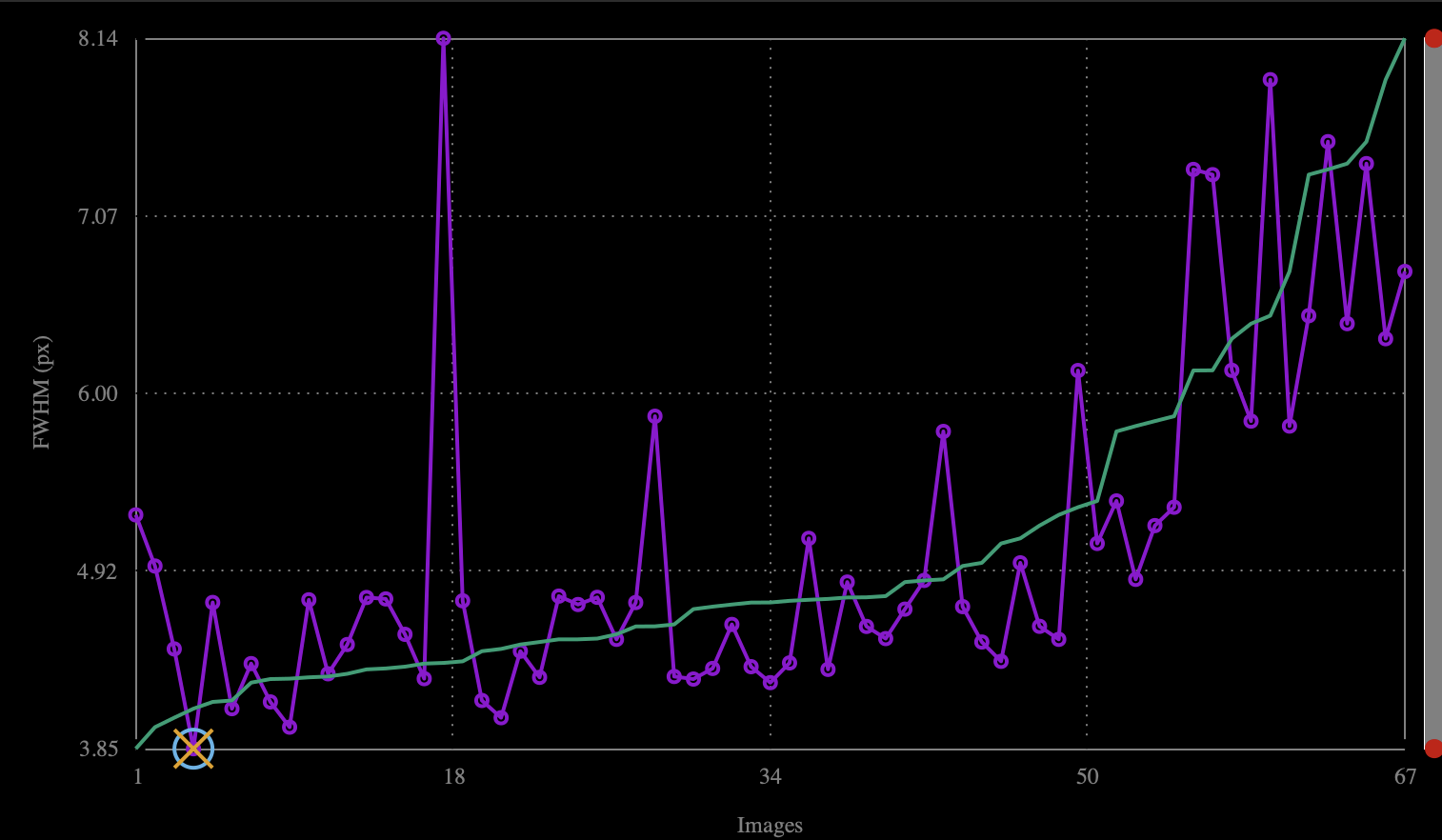
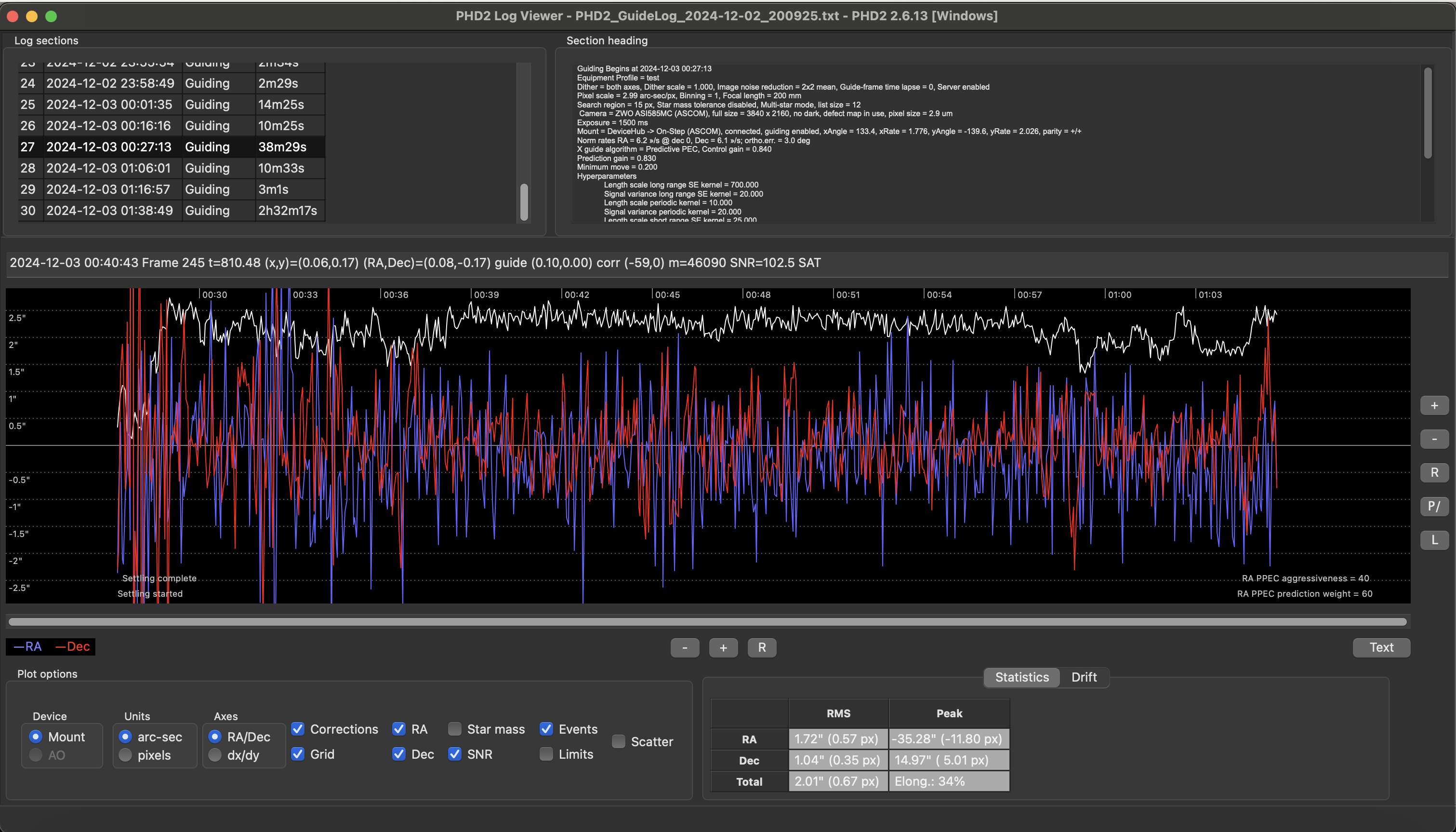
Oui ! Mais en bretagne c'était vraiment compliqué niveau seeing et nuages : j'ai pu sortir ça : - Newt 10" F3 sur Juwei 17 - 67x120s, je garde 50% il y avait de la couverture nuageuse vers la fin : Une brute : empilement 50% FWHM : J'ai fait aucun traitement dessus encore (GraXpert etc...) Mais je suis content : un 254 mm avec reducteur 0.75 nexus passe sur la Juwei ! Phd2 :
-
Bonjour, je voulais savoir si certains d’entre vous font hébergé leur setup astrophoto dans des régions plus clémentes (Espagne, Chili, Maroc, etc…) et si oui quel est votre retour d’expérience ? Bon ciel à tous
-
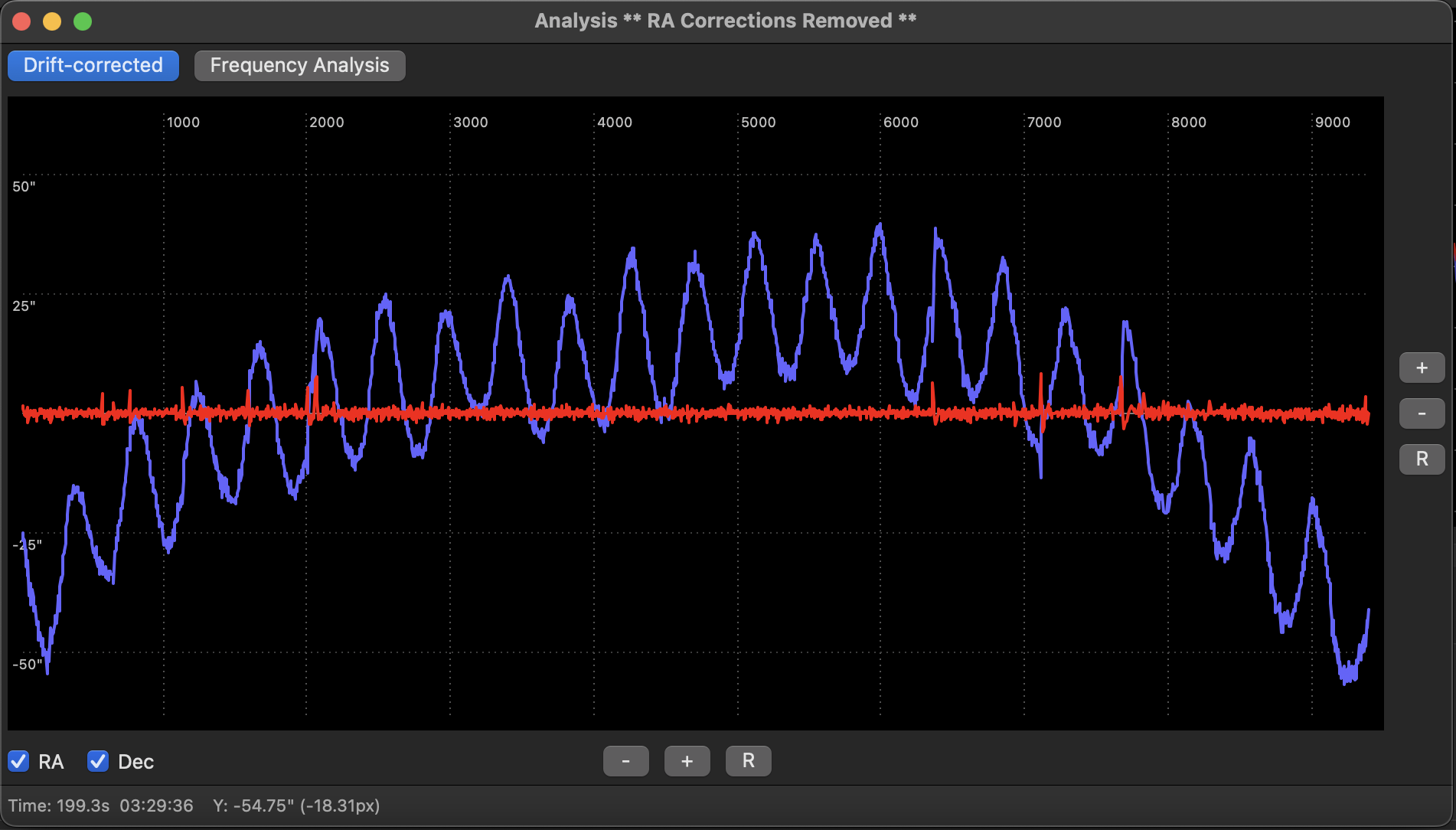
Merci @astroreunion, les chiffres que tu vois entre les différentes sessions ne te choquent pas pour une session avec un ciel bon (au sens du seeing) et un ciel mauvais ?
-
MiniPC, Observatoire et humidité
Argth a répondu à un sujet de phil1789 dans Matériel astrophotographique
idem -
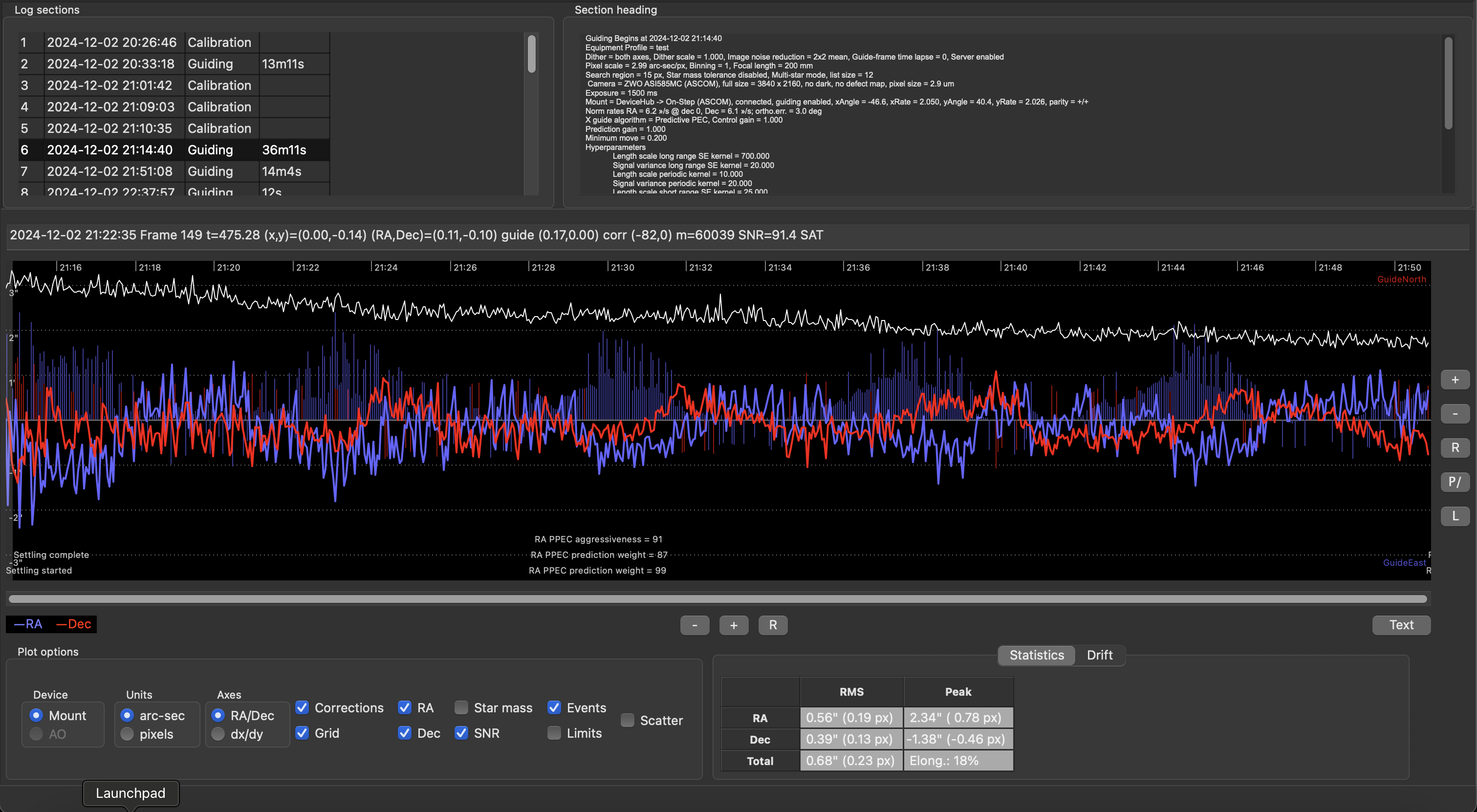
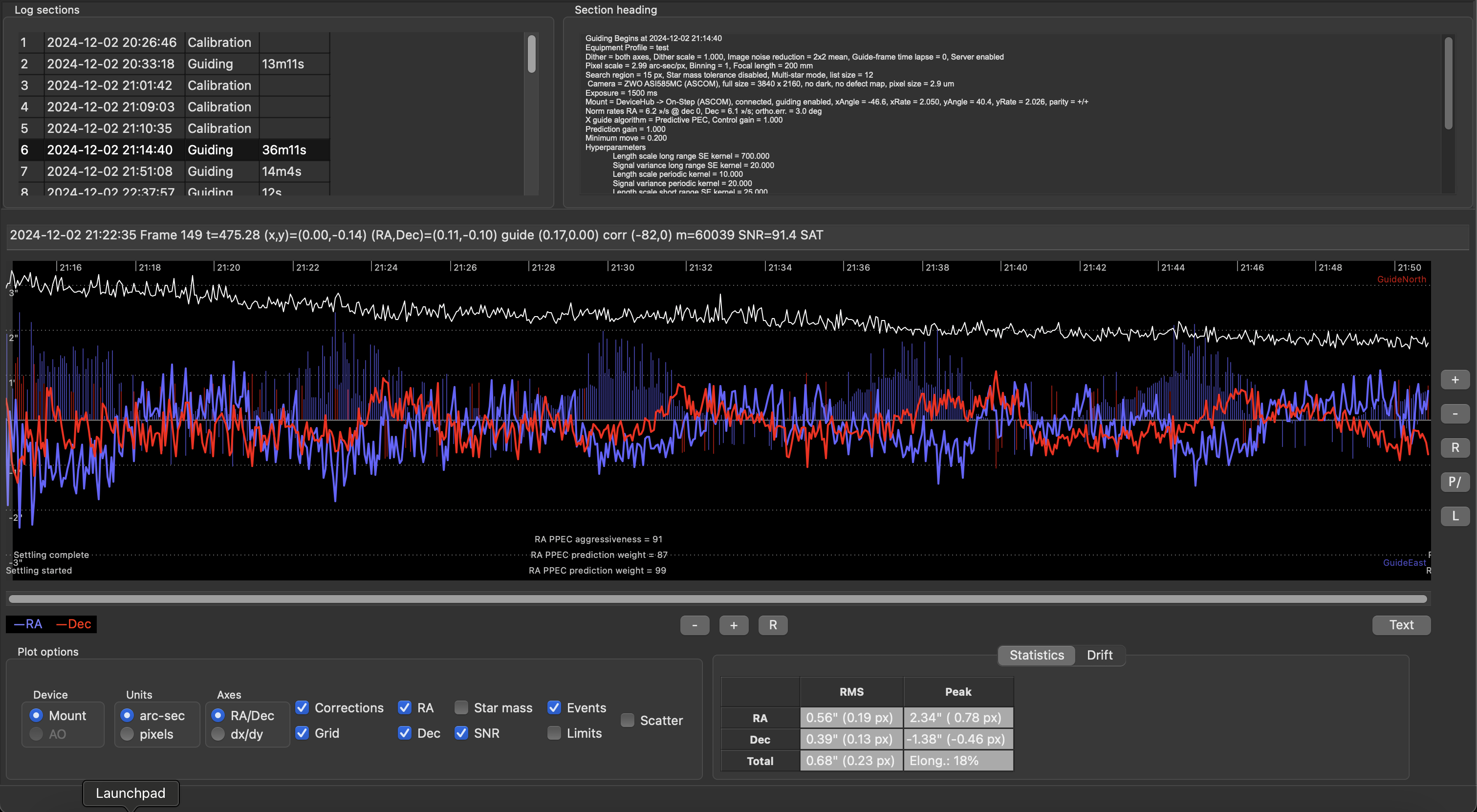
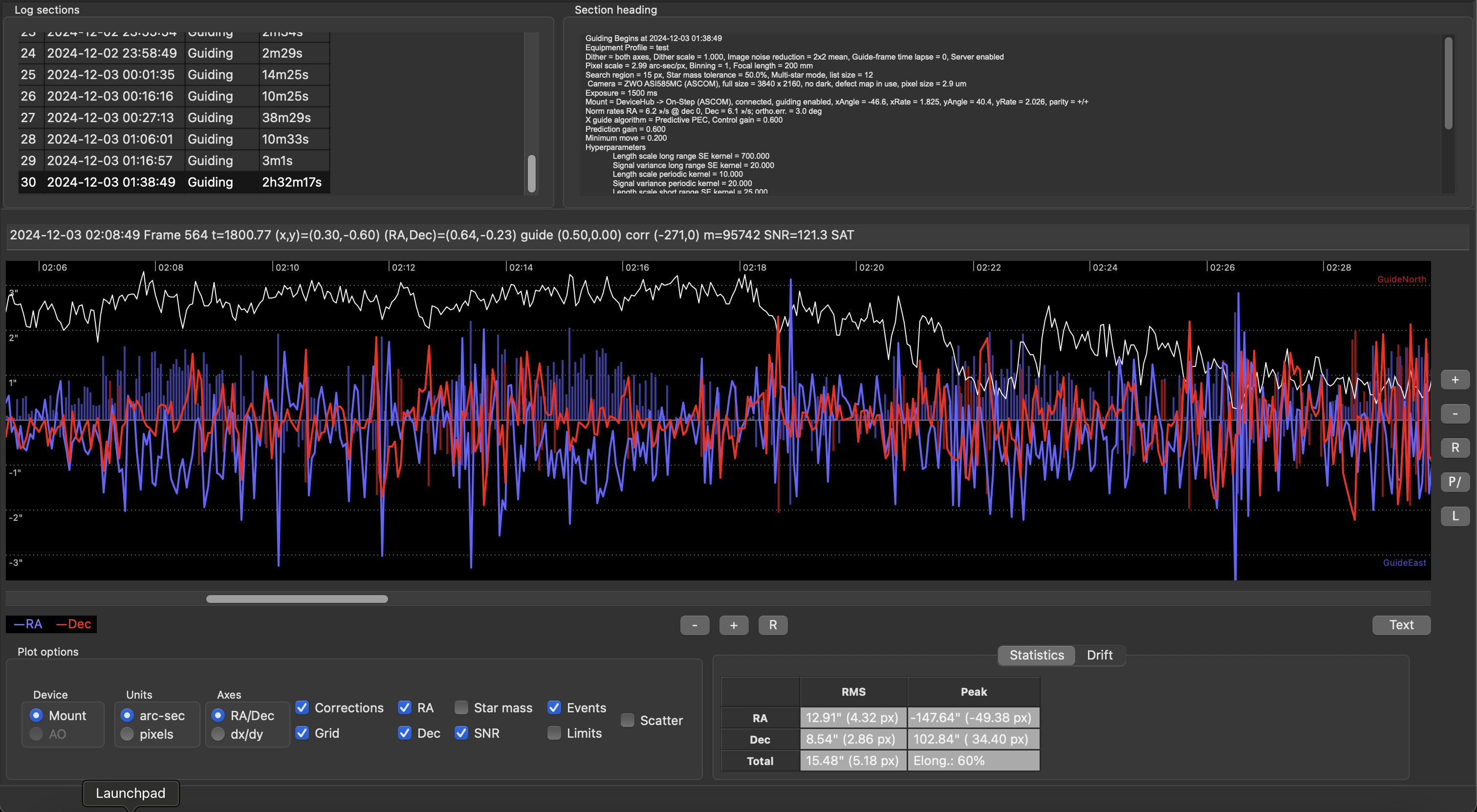
Bonjour à tous, Premières brutes par temps nuageux (merci le beau temps breton...) faites avec le 254/1000 sur la Juwei 17 : elle peut tenir le poids !!! 2min sur M33: Mon experience avec l'autoguidage est limitée alors j'ai une question : j'ai des phases avec des résultats ok pour moi : (on peut encore améliorer avec PHD2 je pense) Et puis plus tard dans la nuit : cata : Il y a eu pas mal de nuages à passer : Quel impact avez vous d'une légere couverture nuageuse sur le guidage ?
-
La glace de silice tient quand même mieux à temperature ambiante Sinon tailler un bloc d'epoxy ?